diff --git a/ros2_ws/src/yolov3/runs/train/exp15/F1_curve.png b/ros2_ws/src/yolov3/runs/train/exp15/F1_curve.png
deleted file mode 100644
index 5298b41a..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/F1_curve.png and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/PR_curve.png b/ros2_ws/src/yolov3/runs/train/exp15/PR_curve.png
deleted file mode 100644
index 4b9b126b..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/PR_curve.png and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/P_curve.png b/ros2_ws/src/yolov3/runs/train/exp15/P_curve.png
deleted file mode 100644
index cf99139d..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/P_curve.png and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/R_curve.png b/ros2_ws/src/yolov3/runs/train/exp15/R_curve.png
deleted file mode 100644
index 8bde6d7a..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/R_curve.png and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/confusion_matrix.png b/ros2_ws/src/yolov3/runs/train/exp15/confusion_matrix.png
deleted file mode 100644
index e63322cf..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/confusion_matrix.png and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/events.out.tfevents.1679397704.3367b61a0909.4261.0 b/ros2_ws/src/yolov3/runs/train/exp15/events.out.tfevents.1679397704.3367b61a0909.4261.0
deleted file mode 100644
index 4af0776a..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/events.out.tfevents.1679397704.3367b61a0909.4261.0 and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/hyp.yaml b/ros2_ws/src/yolov3/runs/train/exp15/hyp.yaml
deleted file mode 100644
index b54281de..00000000
--- a/ros2_ws/src/yolov3/runs/train/exp15/hyp.yaml
+++ /dev/null
@@ -1,28 +0,0 @@
-lr0: 0.01
-lrf: 0.1
-momentum: 0.937
-weight_decay: 0.0005
-warmup_epochs: 3.0
-warmup_momentum: 0.8
-warmup_bias_lr: 0.1
-box: 0.05
-cls: 0.5
-cls_pw: 1.0
-obj: 1.0
-obj_pw: 1.0
-iou_t: 0.2
-anchor_t: 4.0
-fl_gamma: 0.0
-hsv_h: 0.015
-hsv_s: 0.7
-hsv_v: 0.4
-degrees: 0.0
-translate: 0.1
-scale: 0.5
-shear: 0.0
-perspective: 0.0
-flipud: 0.0
-fliplr: 0.5
-mosaic: 1.0
-mixup: 0.0
-copy_paste: 0.0
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/labels.jpg b/ros2_ws/src/yolov3/runs/train/exp15/labels.jpg
deleted file mode 100644
index f93da911..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/labels.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/labels_correlogram.jpg b/ros2_ws/src/yolov3/runs/train/exp15/labels_correlogram.jpg
deleted file mode 100644
index 1ed48e18..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/labels_correlogram.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/opt.yaml b/ros2_ws/src/yolov3/runs/train/exp15/opt.yaml
deleted file mode 100644
index 6a5b5b37..00000000
--- a/ros2_ws/src/yolov3/runs/train/exp15/opt.yaml
+++ /dev/null
@@ -1,37 +0,0 @@
-weights: ''
-cfg: /content/gdrive/MyDrive/yolov3/models/yolov3.yaml
-data: data/custom-yolov3.yaml
-hyp: data/hyps/hyp.scratch.yaml
-epochs: 300
-batch_size: 16
-imgsz: 1280
-rect: false
-resume: false
-nosave: false
-noval: false
-noautoanchor: false
-evolve: null
-bucket: ''
-cache: null
-image_weights: false
-device: ''
-multi_scale: false
-single_cls: false
-adam: false
-sync_bn: false
-workers: 8
-project: runs/train
-name: exp
-exist_ok: false
-quad: false
-linear_lr: false
-label_smoothing: 0.0
-patience: 100
-freeze: 0
-save_period: -1
-local_rank: -1
-entity: null
-upload_dataset: false
-bbox_interval: -1
-artifact_alias: latest
-save_dir: runs/train/exp15
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/results.csv b/ros2_ws/src/yolov3/runs/train/exp15/results.csv
deleted file mode 100644
index b1143152..00000000
--- a/ros2_ws/src/yolov3/runs/train/exp15/results.csv
+++ /dev/null
@@ -1,301 +0,0 @@
- epoch, train/box_loss, train/obj_loss, train/cls_loss, metrics/precision, metrics/recall, metrics/mAP_0.5,metrics/mAP_0.5:0.95, val/box_loss, val/obj_loss, val/cls_loss, x/lr0, x/lr1, x/lr2
- 0, 0.1072, 0.089784, 0.045148, 3.1447e-05, 0.009434, 1.7021e-05, 1.7021e-06, 0.074383, 0.071557, 0.036102, 0.00019, 0.00019, 0.09829
- 1, 0.09357, 0.073808, 0.04392, 6.2893e-05, 0.018868, 3.5032e-05, 6.2107e-06, 0.069977, 0.066751, 0.035672, 0.00038999, 0.00038999, 0.09649
- 2, 0.082933, 0.073286, 0.042061, 6.2893e-05, 0.018868, 3.5252e-05, 3.5252e-06, 0.067869, 0.065488, 0.035208, 0.00058994, 0.00058994, 0.09469
- 3, 0.078388, 0.073047, 0.042215, 9.434e-05, 0.028302, 5.6751e-05, 5.6751e-06, 0.067291, 0.064494, 0.034919, 0.00078982, 0.00078982, 0.09289
- 4, 0.077606, 0.066943, 0.040052, 9.434e-05, 0.028302, 5.7173e-05, 9.217e-06, 0.065971, 0.064303, 0.034521, 0.00098961, 0.00098961, 0.09109
- 5, 0.073009, 0.072096, 0.039418, 0.0010693, 0.082038, 0.00067087, 0.00010067, 0.065407, 0.064251, 0.034196, 0.0011893, 0.0011893, 0.089289
- 6, 0.074801, 0.071712, 0.039586, 0.0010178, 0.16158, 0.00093658, 0.00021294, 0.065921, 0.063458, 0.033979, 0.0013888, 0.0013888, 0.087489
- 7, 0.076127, 0.0702, 0.039439, 0.00084618, 0.17629, 0.0011685, 0.00023231, 0.065714, 0.063461, 0.033674, 0.0015881, 0.0015881, 0.085688
- 8, 0.075849, 0.074078, 0.038786, 0.0092778, 0.030889, 0.0032644, 0.00070873, 0.065679, 0.062307, 0.030542, 0.0017872, 0.0017872, 0.083887
- 9, 0.075436, 0.069392, 0.038983, 0.0060257, 0.10055, 0.0033271, 0.00079476, 0.064516, 0.062611, 0.030316, 0.001986, 0.001986, 0.082086
- 10, 0.077201, 0.071009, 0.035982, 0.015542, 0.070484, 0.005924, 0.0010521, 0.070791, 0.061645, 0.026312, 0.0021846, 0.0021846, 0.080285
- 11, 0.07411, 0.067135, 0.036761, 0.54391, 0.014074, 0.0064732, 0.0012823, 0.079597, 0.077907, 0.033935, 0.0023829, 0.0023829, 0.078483
- 12, 0.072703, 0.066995, 0.036249, 0.015042, 0.15315, 0.0083551, 0.0012464, 0.075651, 0.067622, 0.028427, 0.0025808, 0.0025808, 0.076681
- 13, 0.0737, 0.072585, 0.03594, 0.038881, 0.15844, 0.020356, 0.0033538, 0.063492, 0.061259, 0.026789, 0.0027784, 0.0027784, 0.074878
- 14, 0.072014, 0.072332, 0.036173, 0.036296, 0.10895, 0.018669, 0.003782, 0.061362, 0.061768, 0.026689, 0.0029756, 0.0029756, 0.073076
- 15, 0.072346, 0.071417, 0.033542, 0.090208, 0.14203, 0.0267, 0.0043627, 0.062477, 0.06224, 0.024864, 0.0031723, 0.0031723, 0.071272
- 16, 0.070106, 0.068058, 0.034502, 0.067812, 0.14637, 0.037359, 0.0078725, 0.06237, 0.061756, 0.02467, 0.0033686, 0.0033686, 0.069469
- 17, 0.074946, 0.064136, 0.032574, 0.13835, 0.12299, 0.072165, 0.012966, 0.058928, 0.05861, 0.024038, 0.0035645, 0.0035645, 0.067664
- 18, 0.070358, 0.060051, 0.031907, 0.0479, 0.25203, 0.038178, 0.0060513, 0.05915, 0.058207, 0.025925, 0.0037598, 0.0037598, 0.06586
- 19, 0.067322, 0.055626, 0.03065, 0.82252, 0.060739, 0.063727, 0.012951, 0.065587, 0.053063, 0.021251, 0.0039546, 0.0039546, 0.064055
- 20, 0.068843, 0.057321, 0.030782, 0.18588, 0.17522, 0.10052, 0.0231, 0.057125, 0.052086, 0.021309, 0.0041488, 0.0041488, 0.062249
- 21, 0.06779, 0.056333, 0.030423, 0.14705, 0.2448, 0.14866, 0.026988, 0.057788, 0.054503, 0.020962, 0.0043424, 0.0043424, 0.060442
- 22, 0.065426, 0.052589, 0.030872, 0.31674, 0.30232, 0.25582, 0.068044, 0.051682, 0.048209, 0.020117, 0.0045354, 0.0045354, 0.058635
- 23, 0.067626, 0.056669, 0.027687, 0.10589, 0.17271, 0.068596, 0.015701, 0.064839, 0.051478, 0.020254, 0.0047278, 0.0047278, 0.056828
- 24, 0.059718, 0.052035, 0.026036, 0.42306, 0.42077, 0.40239, 0.11784, 0.055993, 0.041789, 0.015245, 0.0049195, 0.0049195, 0.055019
- 25, 0.066427, 0.060109, 0.026517, 0.21072, 0.40616, 0.23959, 0.044691, 0.060816, 0.050553, 0.017379, 0.0051104, 0.0051104, 0.05321
- 26, 0.068186, 0.057706, 0.026478, 0.14783, 0.51256, 0.19894, 0.060068, 0.057491, 0.04908, 0.018394, 0.0053007, 0.0053007, 0.051401
- 27, 0.066612, 0.050319, 0.024494, 0.48579, 0.42298, 0.40479, 0.11374, 0.056078, 0.045788, 0.014807, 0.0054901, 0.0054901, 0.04959
- 28, 0.063534, 0.052454, 0.024039, 0.40719, 0.36156, 0.30722, 0.10794, 0.055933, 0.046081, 0.021163, 0.0056788, 0.0056788, 0.047779
- 29, 0.063979, 0.050578, 0.023715, 0.11747, 0.27502, 0.089202, 0.017614, 0.058407, 0.055614, 0.019128, 0.0058667, 0.0058667, 0.045967
- 30, 0.061931, 0.04879, 0.021555, 0.097, 0.14031, 0.055955, 0.0091582, 0.056716, 0.063297, 0.024825, 0.0060537, 0.0060537, 0.044154
- 31, 0.057106, 0.050596, 0.020186, 0.46931, 0.63839, 0.47727, 0.14214, 0.047358, 0.044311, 0.013691, 0.0062398, 0.0062398, 0.04234
- 32, 0.061115, 0.046957, 0.020035, 0.63103, 0.71706, 0.687, 0.25922, 0.046848, 0.037924, 0.011027, 0.006425, 0.006425, 0.040525
- 33, 0.056406, 0.046535, 0.01865, 0.43884, 0.62161, 0.51021, 0.17632, 0.05008, 0.038613, 0.014262, 0.0066094, 0.0066094, 0.038709
- 34, 0.059193, 0.048328, 0.019087, 0.40999, 0.66487, 0.53293, 0.19979, 0.047951, 0.038267, 0.0089096, 0.0067927, 0.0067927, 0.036893
- 35, 0.058858, 0.046026, 0.018089, 0.49914, 0.45985, 0.44086, 0.14173, 0.055914, 0.049698, 0.016622, 0.0069751, 0.0069751, 0.035075
- 36, 0.05378, 0.046878, 0.017436, 0.54042, 0.40374, 0.42118, 0.12772, 0.053832, 0.048224, 0.015295, 0.0071565, 0.0071565, 0.033256
- 37, 0.057157, 0.047375, 0.01825, 0.45283, 0.17341, 0.1188, 0.023888, 0.05297, 0.06591, 0.028537, 0.0073368, 0.0073368, 0.031437
- 38, 0.055086, 0.044643, 0.016019, 0.59048, 0.58181, 0.54786, 0.20768, 0.046944, 0.041786, 0.011842, 0.0075161, 0.0075161, 0.029616
- 39, 0.052514, 0.042485, 0.016678, 0.60654, 0.62859, 0.65293, 0.27689, 0.04138, 0.043998, 0.0078349, 0.0076943, 0.0076943, 0.027794
- 40, 0.054016, 0.045163, 0.016713, 0.43989, 0.24508, 0.23914, 0.074126, 0.052986, 0.055093, 0.029361, 0.0078714, 0.0078714, 0.025971
- 41, 0.052897, 0.042598, 0.014125, 0.66111, 0.45699, 0.54765, 0.20954, 0.04524, 0.048015, 0.013144, 0.0080473, 0.0080473, 0.024147
- 42, 0.051021, 0.042313, 0.012967, 0.64228, 0.50983, 0.5556, 0.2054, 0.049423, 0.04853, 0.014758, 0.0082221, 0.0082221, 0.022322
- 43, 0.05275, 0.041908, 0.012555, 0.76316, 0.7306, 0.72312, 0.21781, 0.046986, 0.032759, 0.0042896, 0.0083957, 0.0083957, 0.020496
- 44, 0.052692, 0.040748, 0.012202, 0.73323, 0.7009, 0.74501, 0.32735, 0.040507, 0.036143, 0.0074856, 0.0085681, 0.0085681, 0.018668
- 45, 0.051049, 0.040343, 0.010494, 0.79341, 0.8425, 0.8331, 0.38394, 0.042813, 0.033749, 0.0054575, 0.0087393, 0.0087393, 0.016839
- 46, 0.052916, 0.04602, 0.016315, 0.0074664, 0.36345, 0.0069738, 0.0012171, 0.071852, 0.057659, 0.040379, 0.0089092, 0.0089092, 0.015009
- 47, 0.061261, 0.055108, 0.025584, 0, 0, 0, 0, 0.10342, 0.10308, 0.61562, 0.0090778, 0.0090778, 0.013178
- 48, 0.055741, 0.048942, 0.022914, 0, 0, 0, 0, 0.091703, 0.15503, 0.50829, 0.0092451, 0.0092451, 0.011345
- 49, 0.055505, 0.046065, 0.01996, 0.40454, 0.43583, 0.36731, 0.1155, 0.054668, 0.048338, 0.01677, 0.009411, 0.009411, 0.009511
- 50, 0.052316, 0.04637, 0.01857, 0.29994, 0.17425, 0.1908, 0.069672, 0.061657, 0.058302, 0.017473, 0.0093971, 0.0093971, 0.0093971
- 51, 0.052513, 0.044853, 0.016164, 0.32316, 0.21994, 0.18133, 0.052024, 0.054571, 0.052566, 0.018779, 0.0093971, 0.0093971, 0.0093971
- 52, 0.050169, 0.041122, 0.013702, 0.71349, 0.46749, 0.50083, 0.20943, 0.05027, 0.040049, 0.0090618, 0.0093733, 0.0093733, 0.0093733
- 53, 0.052356, 0.038377, 0.012993, 0.70745, 0.58166, 0.63794, 0.29499, 0.043828, 0.039433, 0.006337, 0.0093491, 0.0093491, 0.0093491
- 54, 0.049593, 0.041015, 0.013021, 0.8286, 0.83119, 0.85701, 0.39813, 0.044484, 0.031344, 0.0039315, 0.0093245, 0.0093245, 0.0093245
- 55, 0.050457, 0.040325, 0.011648, 0.90411, 0.72727, 0.81333, 0.32555, 0.050267, 0.031773, 0.0036776, 0.0092995, 0.0092995, 0.0092995
- 56, 0.048361, 0.037615, 0.01134, 0.83214, 0.70918, 0.7804, 0.32044, 0.048583, 0.035312, 0.0075229, 0.009274, 0.009274, 0.009274
- 57, 0.045264, 0.037444, 0.010766, 0.73705, 0.60835, 0.67841, 0.33454, 0.037938, 0.035844, 0.011167, 0.0092481, 0.0092481, 0.0092481
- 58, 0.048281, 0.038769, 0.0095906, 0.77539, 0.72818, 0.77761, 0.35702, 0.038495, 0.033515, 0.0052658, 0.0092219, 0.0092219, 0.0092219
- 59, 0.045365, 0.036449, 0.0083486, 0.84428, 0.80126, 0.86356, 0.45554, 0.039402, 0.029563, 0.00649, 0.0091952, 0.0091952, 0.0091952
- 60, 0.047082, 0.038087, 0.01002, 0.82263, 0.84693, 0.89213, 0.45806, 0.038933, 0.03161, 0.0054989, 0.0091681, 0.0091681, 0.0091681
- 61, 0.043742, 0.036556, 0.0088003, 0.92037, 0.8607, 0.9257, 0.48197, 0.036326, 0.030955, 0.0034465, 0.0091406, 0.0091406, 0.0091406
- 62, 0.044255, 0.036951, 0.010437, 0.87895, 0.89227, 0.91443, 0.44407, 0.043374, 0.028684, 0.0026665, 0.0091127, 0.0091127, 0.0091127
- 63, 0.045161, 0.03555, 0.0089086, 0.92405, 0.88652, 0.91847, 0.5026, 0.039014, 0.030431, 0.0025694, 0.0090844, 0.0090844, 0.0090844
- 64, 0.045083, 0.037143, 0.0087739, 0.93807, 0.88789, 0.93251, 0.48687, 0.041815, 0.028742, 0.002422, 0.0090557, 0.0090557, 0.0090557
- 65, 0.040342, 0.037515, 0.0077562, 0.92831, 0.92405, 0.95091, 0.55001, 0.033787, 0.028646, 0.0023556, 0.0090266, 0.0090266, 0.0090266
- 66, 0.044417, 0.032584, 0.0076607, 0.92958, 0.86946, 0.92922, 0.53225, 0.035044, 0.028907, 0.0025468, 0.0089972, 0.0089972, 0.0089972
- 67, 0.039694, 0.035995, 0.0079306, 0.88746, 0.90617, 0.92104, 0.51225, 0.035307, 0.027231, 0.003196, 0.0089673, 0.0089673, 0.0089673
- 68, 0.044565, 0.034608, 0.0088018, 0.87307, 0.84145, 0.90489, 0.50325, 0.034845, 0.032796, 0.0049277, 0.0089371, 0.0089371, 0.0089371
- 69, 0.042965, 0.033984, 0.01085, 0.9106, 0.85758, 0.91816, 0.51602, 0.035491, 0.030649, 0.0044527, 0.0089065, 0.0089065, 0.0089065
- 70, 0.04196, 0.035426, 0.0084481, 0.86355, 0.90502, 0.92138, 0.55436, 0.032832, 0.029249, 0.0028974, 0.0088755, 0.0088755, 0.0088755
- 71, 0.038512, 0.036, 0.0078214, 0.94121, 0.89692, 0.94946, 0.54232, 0.035271, 0.027604, 0.0020984, 0.0088442, 0.0088442, 0.0088442
- 72, 0.041711, 0.035849, 0.0077841, 0.94633, 0.90146, 0.94532, 0.55551, 0.034369, 0.028245, 0.0028688, 0.0088124, 0.0088124, 0.0088124
- 73, 0.043422, 0.034141, 0.008423, 0.89791, 0.79773, 0.89551, 0.49783, 0.036391, 0.032343, 0.0036569, 0.0087804, 0.0087804, 0.0087804
- 74, 0.041125, 0.034275, 0.0088747, 0.94643, 0.86711, 0.9366, 0.54438, 0.031141, 0.029405, 0.0027034, 0.0087479, 0.0087479, 0.0087479
- 75, 0.039719, 0.034131, 0.0079598, 0.9524, 0.91862, 0.9582, 0.59485, 0.03173, 0.026338, 0.0019864, 0.0087151, 0.0087151, 0.0087151
- 76, 0.040181, 0.033154, 0.0080667, 0.90734, 0.83848, 0.92208, 0.47094, 0.038296, 0.031134, 0.0040538, 0.008682, 0.008682, 0.008682
- 77, 0.03966, 0.033198, 0.0066327, 0.94442, 0.86113, 0.92597, 0.45845, 0.035619, 0.028766, 0.0026854, 0.0086485, 0.0086485, 0.0086485
- 78, 0.038331, 0.034961, 0.0069487, 0.91974, 0.89982, 0.94746, 0.51601, 0.034682, 0.02985, 0.0028031, 0.0086146, 0.0086146, 0.0086146
- 79, 0.038131, 0.034181, 0.0070184, 0.9505, 0.92209, 0.95505, 0.56273, 0.031882, 0.030202, 0.0025396, 0.0085805, 0.0085805, 0.0085805
- 80, 0.037099, 0.033424, 0.0061094, 0.95886, 0.9318, 0.94569, 0.56409, 0.031647, 0.027277, 0.0028533, 0.0085459, 0.0085459, 0.0085459
- 81, 0.038213, 0.035, 0.0062455, 0.90117, 0.91763, 0.93225, 0.58747, 0.030732, 0.026239, 0.0024431, 0.0085111, 0.0085111, 0.0085111
- 82, 0.038884, 0.031852, 0.0060274, 0.94817, 0.92094, 0.95121, 0.55533, 0.031829, 0.026745, 0.0023725, 0.0084759, 0.0084759, 0.0084759
- 83, 0.036625, 0.033138, 0.0079261, 0.95916, 0.91625, 0.94151, 0.5457, 0.034776, 0.026776, 0.0021613, 0.0084404, 0.0084404, 0.0084404
- 84, 0.038809, 0.032023, 0.0062357, 0.93504, 0.92504, 0.95141, 0.58087, 0.033784, 0.026052, 0.0023802, 0.0084046, 0.0084046, 0.0084046
- 85, 0.037893, 0.034964, 0.0068261, 0.92978, 0.93218, 0.95634, 0.58927, 0.031465, 0.026274, 0.0021452, 0.0083684, 0.0083684, 0.0083684
- 86, 0.038298, 0.033131, 0.0060222, 0.94402, 0.95637, 0.96109, 0.55015, 0.033578, 0.028523, 0.002081, 0.0083319, 0.0083319, 0.0083319
- 87, 0.037152, 0.034427, 0.0058415, 0.93586, 0.91752, 0.94697, 0.59167, 0.030662, 0.027937, 0.0022087, 0.0082952, 0.0082952, 0.0082952
- 88, 0.033444, 0.033919, 0.0065007, 0.97881, 0.93894, 0.95851, 0.60322, 0.031015, 0.025488, 0.0023777, 0.0082581, 0.0082581, 0.0082581
- 89, 0.034102, 0.033245, 0.006238, 0.97284, 0.92101, 0.95236, 0.58836, 0.031254, 0.026429, 0.0026268, 0.0082207, 0.0082207, 0.0082207
- 90, 0.033522, 0.03244, 0.0050727, 0.96762, 0.87823, 0.94835, 0.59588, 0.029, 0.026984, 0.003767, 0.008183, 0.008183, 0.008183
- 91, 0.034385, 0.03257, 0.0068179, 0.96143, 0.94048, 0.96293, 0.61393, 0.032598, 0.025748, 0.0025069, 0.008145, 0.008145, 0.008145
- 92, 0.038411, 0.03149, 0.008301, 0.85757, 0.82488, 0.90553, 0.50806, 0.03392, 0.030222, 0.0066837, 0.0081068, 0.0081068, 0.0081068
- 93, 0.038098, 0.030603, 0.0062063, 0.87368, 0.83447, 0.8986, 0.48715, 0.032855, 0.030639, 0.0038948, 0.0080682, 0.0080682, 0.0080682
- 94, 0.038408, 0.031401, 0.0071762, 0.97569, 0.88239, 0.94377, 0.57059, 0.032335, 0.027143, 0.0022352, 0.0080294, 0.0080294, 0.0080294
- 95, 0.037455, 0.031985, 0.0056255, 0.92462, 0.91911, 0.95528, 0.57158, 0.032933, 0.02751, 0.0028774, 0.0079903, 0.0079903, 0.0079903
- 96, 0.034081, 0.032974, 0.0055842, 0.95494, 0.95877, 0.96191, 0.56896, 0.031626, 0.02607, 0.0021001, 0.0079509, 0.0079509, 0.0079509
- 97, 0.036189, 0.031882, 0.0066565, 0.95704, 0.92485, 0.96058, 0.61761, 0.031169, 0.024964, 0.0026779, 0.0079112, 0.0079112, 0.0079112
- 98, 0.034716, 0.033089, 0.0062765, 0.95208, 0.9259, 0.95999, 0.58112, 0.031563, 0.025833, 0.002693, 0.0078713, 0.0078713, 0.0078713
- 99, 0.035807, 0.032488, 0.0062112, 0.94346, 0.93805, 0.95484, 0.58984, 0.030902, 0.025948, 0.0019203, 0.0078311, 0.0078311, 0.0078311
- 100, 0.035404, 0.030942, 0.0070651, 0.90669, 0.90848, 0.94371, 0.55885, 0.032847, 0.031035, 0.0054341, 0.0077907, 0.0077907, 0.0077907
- 101, 0.034805, 0.032716, 0.007314, 0.95797, 0.95318, 0.96146, 0.57165, 0.031743, 0.027374, 0.0019765, 0.00775, 0.00775, 0.00775
- 102, 0.036556, 0.032288, 0.0068758, 0.93197, 0.95396, 0.96154, 0.58878, 0.030179, 0.028715, 0.0022038, 0.0077091, 0.0077091, 0.0077091
- 103, 0.034745, 0.03311, 0.0060098, 0.91789, 0.95751, 0.9557, 0.60553, 0.030048, 0.028515, 0.0018339, 0.0076679, 0.0076679, 0.0076679
- 104, 0.035191, 0.032241, 0.0060717, 0.89044, 0.92859, 0.9459, 0.55454, 0.031789, 0.029479, 0.0041273, 0.0076265, 0.0076265, 0.0076265
- 105, 0.035232, 0.030591, 0.0058525, 0.88359, 0.89753, 0.93313, 0.58269, 0.030801, 0.027946, 0.0030299, 0.0075848, 0.0075848, 0.0075848
- 106, 0.034891, 0.031808, 0.0054986, 0.92895, 0.85635, 0.92882, 0.49609, 0.034223, 0.029069, 0.0034086, 0.007543, 0.007543, 0.007543
- 107, 0.034206, 0.032183, 0.0059379, 0.95328, 0.90682, 0.95609, 0.5899, 0.032747, 0.02519, 0.002409, 0.0075009, 0.0075009, 0.0075009
- 108, 0.035193, 0.032691, 0.006186, 0.76003, 0.88884, 0.92562, 0.52785, 0.033637, 0.027941, 0.0085591, 0.0074585, 0.0074585, 0.0074585
- 109, 0.032678, 0.031774, 0.0051808, 0.9394, 0.94668, 0.95971, 0.59036, 0.029259, 0.025816, 0.0018039, 0.007416, 0.007416, 0.007416
- 110, 0.034928, 0.032253, 0.0052045, 0.96947, 0.9156, 0.95994, 0.57839, 0.031965, 0.025841, 0.0017381, 0.0073733, 0.0073733, 0.0073733
- 111, 0.032909, 0.030654, 0.0068091, 0.93353, 0.9431, 0.95796, 0.6155, 0.029402, 0.024355, 0.00166, 0.0073303, 0.0073303, 0.0073303
- 112, 0.034421, 0.030596, 0.0056472, 0.97009, 0.96553, 0.96802, 0.62231, 0.027934, 0.024545, 0.0017626, 0.0072872, 0.0072872, 0.0072872
- 113, 0.033877, 0.031202, 0.0048802, 0.96084, 0.94522, 0.95601, 0.59425, 0.029266, 0.025481, 0.0019383, 0.0072438, 0.0072438, 0.0072438
- 114, 0.032888, 0.030615, 0.0059414, 0.96707, 0.96629, 0.96299, 0.58985, 0.028752, 0.02581, 0.001971, 0.0072003, 0.0072003, 0.0072003
- 115, 0.033697, 0.032449, 0.0059314, 0.98178, 0.96195, 0.96413, 0.62237, 0.030004, 0.025665, 0.0022348, 0.0071566, 0.0071566, 0.0071566
- 116, 0.032169, 0.028243, 0.0053777, 0.96855, 0.95665, 0.96663, 0.59072, 0.030777, 0.027957, 0.0025654, 0.0071127, 0.0071127, 0.0071127
- 117, 0.031322, 0.029406, 0.0044561, 0.95818, 0.95873, 0.96789, 0.61904, 0.03089, 0.02532, 0.0023165, 0.0070686, 0.0070686, 0.0070686
- 118, 0.032621, 0.031882, 0.0060545, 0.96766, 0.9703, 0.97043, 0.61416, 0.031658, 0.02589, 0.0024626, 0.0070243, 0.0070243, 0.0070243
- 119, 0.033223, 0.027714, 0.0065067, 0.98299, 0.96548, 0.96768, 0.62695, 0.029253, 0.02492, 0.0019283, 0.0069799, 0.0069799, 0.0069799
- 120, 0.033553, 0.029447, 0.0063224, 0.98701, 0.95656, 0.96794, 0.64578, 0.027592, 0.02491, 0.0018422, 0.0069353, 0.0069353, 0.0069353
- 121, 0.03325, 0.028541, 0.0051204, 0.98317, 0.93651, 0.96604, 0.61816, 0.032385, 0.023813, 0.0019208, 0.0068906, 0.0068906, 0.0068906
- 122, 0.033097, 0.02979, 0.0057041, 0.97144, 0.93651, 0.96183, 0.61828, 0.027016, 0.026034, 0.0019498, 0.0068457, 0.0068457, 0.0068457
- 123, 0.032385, 0.031679, 0.0052411, 0.97262, 0.94493, 0.96298, 0.62283, 0.026364, 0.025603, 0.0019448, 0.0068006, 0.0068006, 0.0068006
- 124, 0.033781, 0.029724, 0.0050386, 0.95657, 0.95188, 0.96177, 0.64612, 0.028362, 0.024317, 0.0019741, 0.0067555, 0.0067555, 0.0067555
- 125, 0.032106, 0.029237, 0.0045665, 0.94958, 0.9452, 0.96075, 0.64017, 0.028601, 0.024065, 0.0021955, 0.0067101, 0.0067101, 0.0067101
- 126, 0.032264, 0.029086, 0.0054842, 0.95887, 0.96354, 0.96768, 0.66344, 0.026937, 0.023887, 0.0024299, 0.0066647, 0.0066647, 0.0066647
- 127, 0.032503, 0.030248, 0.0055057, 0.96337, 0.96553, 0.96908, 0.6688, 0.026015, 0.023054, 0.002129, 0.0066191, 0.0066191, 0.0066191
- 128, 0.031848, 0.030237, 0.0040163, 0.97874, 0.9667, 0.96928, 0.65926, 0.026758, 0.024459, 0.0019228, 0.0065734, 0.0065734, 0.0065734
- 129, 0.033826, 0.03026, 0.0075954, 0.97185, 0.97532, 0.97586, 0.65575, 0.027961, 0.023636, 0.0018942, 0.0065276, 0.0065276, 0.0065276
- 130, 0.034133, 0.029008, 0.0056355, 0.98736, 0.94112, 0.9718, 0.63606, 0.02707, 0.024257, 0.0019156, 0.0064816, 0.0064816, 0.0064816
- 131, 0.032031, 0.029106, 0.0046239, 0.97221, 0.91833, 0.96514, 0.62362, 0.027138, 0.024794, 0.0020008, 0.0064356, 0.0064356, 0.0064356
- 132, 0.031064, 0.028333, 0.005266, 0.90643, 0.90848, 0.94398, 0.52023, 0.032159, 0.02668, 0.0031502, 0.0063895, 0.0063895, 0.0063895
- 133, 0.031294, 0.030179, 0.0047473, 0.9751, 0.94523, 0.96989, 0.60873, 0.028775, 0.024644, 0.0019185, 0.0063432, 0.0063432, 0.0063432
- 134, 0.03095, 0.029861, 0.004757, 0.93719, 0.96354, 0.96023, 0.64725, 0.026088, 0.024737, 0.001847, 0.0062969, 0.0062969, 0.0062969
- 135, 0.030516, 0.028845, 0.0047947, 0.95301, 0.95197, 0.96786, 0.62838, 0.026574, 0.024545, 0.0017698, 0.0062505, 0.0062505, 0.0062505
- 136, 0.030475, 0.02846, 0.0055107, 0.96437, 0.9451, 0.96404, 0.64108, 0.027123, 0.024913, 0.0017149, 0.006204, 0.006204, 0.006204
- 137, 0.030362, 0.029429, 0.0048351, 0.97425, 0.96309, 0.96501, 0.6316, 0.027754, 0.025372, 0.0018266, 0.0061574, 0.0061574, 0.0061574
- 138, 0.030377, 0.030139, 0.0047596, 0.96266, 0.96512, 0.96441, 0.63686, 0.027537, 0.024936, 0.0019117, 0.0061107, 0.0061107, 0.0061107
- 139, 0.030934, 0.027383, 0.0046041, 0.97265, 0.9703, 0.96765, 0.64827, 0.027235, 0.024562, 0.0018573, 0.006064, 0.006064, 0.006064
- 140, 0.030503, 0.030103, 0.005123, 0.96566, 0.95537, 0.96187, 0.62706, 0.027453, 0.024727, 0.0018926, 0.0060172, 0.0060172, 0.0060172
- 141, 0.031252, 0.028443, 0.0041605, 0.97251, 0.96352, 0.96748, 0.66484, 0.026909, 0.024105, 0.0020043, 0.0059704, 0.0059704, 0.0059704
- 142, 0.029091, 0.029802, 0.004882, 0.98107, 0.97705, 0.97517, 0.6692, 0.025419, 0.023475, 0.0019698, 0.0059235, 0.0059235, 0.0059235
- 143, 0.029031, 0.027532, 0.0044102, 0.96415, 0.95001, 0.96306, 0.65746, 0.026583, 0.024414, 0.0018636, 0.0058766, 0.0058766, 0.0058766
- 144, 0.030322, 0.029805, 0.0045858, 0.95213, 0.97029, 0.96608, 0.66087, 0.02622, 0.024185, 0.0019045, 0.0058296, 0.0058296, 0.0058296
- 145, 0.03003, 0.027735, 0.0042047, 0.9629, 0.97049, 0.97254, 0.6706, 0.025957, 0.023952, 0.0019944, 0.0057826, 0.0057826, 0.0057826
- 146, 0.030178, 0.028212, 0.0038413, 0.97726, 0.96369, 0.96698, 0.6622, 0.025378, 0.025052, 0.0019726, 0.0057355, 0.0057355, 0.0057355
- 147, 0.0287, 0.027819, 0.0042913, 0.97216, 0.96354, 0.96631, 0.64059, 0.025874, 0.024205, 0.0019755, 0.0056884, 0.0056884, 0.0056884
- 148, 0.032043, 0.027684, 0.0048876, 0.98775, 0.95678, 0.96185, 0.61574, 0.029168, 0.025582, 0.001935, 0.0056413, 0.0056413, 0.0056413
- 149, 0.030177, 0.027118, 0.0045694, 0.98348, 0.95001, 0.96349, 0.66463, 0.026593, 0.023216, 0.0019195, 0.0055942, 0.0055942, 0.0055942
- 150, 0.028507, 0.030105, 0.0049029, 0.98161, 0.95661, 0.96846, 0.65684, 0.02566, 0.023492, 0.0021502, 0.0055471, 0.0055471, 0.0055471
- 151, 0.030499, 0.028858, 0.0074011, 0.98125, 0.9703, 0.97297, 0.68484, 0.026201, 0.022504, 0.002315, 0.0055, 0.0055, 0.0055
- 152, 0.02793, 0.028107, 0.0056783, 0.98268, 0.95669, 0.96742, 0.68158, 0.026543, 0.023369, 0.0024157, 0.0054529, 0.0054529, 0.0054529
- 153, 0.028745, 0.027211, 0.0047151, 0.98282, 0.95678, 0.96778, 0.67643, 0.024136, 0.022676, 0.0020738, 0.0054058, 0.0054058, 0.0054058
- 154, 0.02988, 0.028095, 0.0047024, 0.97564, 0.95678, 0.96446, 0.67542, 0.026337, 0.02249, 0.002291, 0.0053587, 0.0053587, 0.0053587
- 155, 0.028457, 0.029243, 0.0047708, 0.96159, 0.95678, 0.95796, 0.66082, 0.026913, 0.022992, 0.0021378, 0.0053116, 0.0053116, 0.0053116
- 156, 0.028992, 0.027253, 0.0048825, 0.97888, 0.96996, 0.9719, 0.6495, 0.027016, 0.022958, 0.001994, 0.0052645, 0.0052645, 0.0052645
- 157, 0.028998, 0.028506, 0.0044686, 0.95299, 0.97018, 0.96508, 0.6518, 0.026524, 0.022246, 0.0018938, 0.0052174, 0.0052174, 0.0052174
- 158, 0.029876, 0.028789, 0.0045456, 0.97905, 0.9703, 0.96656, 0.67184, 0.026013, 0.023414, 0.0020316, 0.0051704, 0.0051704, 0.0051704
- 159, 0.02783, 0.027954, 0.0047788, 0.95981, 0.9703, 0.97331, 0.65536, 0.026615, 0.023393, 0.0021369, 0.0051234, 0.0051234, 0.0051234
- 160, 0.02881, 0.029834, 0.0051372, 0.96231, 0.97705, 0.97276, 0.67234, 0.02516, 0.023334, 0.0020906, 0.0050765, 0.0050765, 0.0050765
- 161, 0.02907, 0.028024, 0.0050542, 0.97128, 0.97694, 0.97459, 0.67987, 0.024301, 0.022933, 0.0018993, 0.0050296, 0.0050296, 0.0050296
- 162, 0.027088, 0.02831, 0.0049067, 0.97555, 0.97705, 0.97511, 0.68172, 0.02416, 0.022443, 0.0016887, 0.0049828, 0.0049828, 0.0049828
- 163, 0.030222, 0.026841, 0.004733, 0.97753, 0.97705, 0.97482, 0.68213, 0.025884, 0.02258, 0.0016608, 0.004936, 0.004936, 0.004936
- 164, 0.028023, 0.028466, 0.0040835, 0.95802, 0.94365, 0.96412, 0.68017, 0.027131, 0.022298, 0.0018087, 0.0048893, 0.0048893, 0.0048893
- 165, 0.028881, 0.028552, 0.0037733, 0.98463, 0.9703, 0.966, 0.69216, 0.024287, 0.022506, 0.0017584, 0.0048426, 0.0048426, 0.0048426
- 166, 0.02887, 0.028066, 0.0051819, 0.97967, 0.97023, 0.96605, 0.67742, 0.023991, 0.022966, 0.0017765, 0.004796, 0.004796, 0.004796
- 167, 0.027769, 0.027876, 0.0045376, 0.97336, 0.9703, 0.96585, 0.67378, 0.024131, 0.022832, 0.0018437, 0.0047495, 0.0047495, 0.0047495
- 168, 0.026105, 0.026978, 0.0043823, 0.98068, 0.9703, 0.97141, 0.68531, 0.02506, 0.022971, 0.0019168, 0.0047031, 0.0047031, 0.0047031
- 169, 0.027398, 0.02762, 0.0039622, 0.98055, 0.96775, 0.96652, 0.69533, 0.023761, 0.022578, 0.0018546, 0.0046568, 0.0046568, 0.0046568
- 170, 0.028034, 0.027971, 0.0037273, 0.97684, 0.9703, 0.96783, 0.69053, 0.023457, 0.0223, 0.0017781, 0.0046105, 0.0046105, 0.0046105
- 171, 0.027347, 0.028535, 0.0038968, 0.97337, 0.96354, 0.96296, 0.67883, 0.024073, 0.022644, 0.001817, 0.0045644, 0.0045644, 0.0045644
- 172, 0.028142, 0.026267, 0.0034699, 0.98644, 0.96343, 0.96703, 0.69874, 0.02388, 0.02208, 0.0017773, 0.0045184, 0.0045184, 0.0045184
- 173, 0.026171, 0.027753, 0.0050813, 0.97569, 0.96352, 0.96478, 0.67178, 0.02579, 0.022882, 0.0018091, 0.0044724, 0.0044724, 0.0044724
- 174, 0.026128, 0.026436, 0.0053865, 0.97295, 0.96346, 0.96565, 0.67965, 0.025346, 0.023009, 0.001846, 0.0044266, 0.0044266, 0.0044266
- 175, 0.02726, 0.027188, 0.0035265, 0.97704, 0.96351, 0.96655, 0.68568, 0.024316, 0.022898, 0.0017214, 0.0043809, 0.0043809, 0.0043809
- 176, 0.026716, 0.026838, 0.0031932, 0.98022, 0.96354, 0.96597, 0.68301, 0.025983, 0.023226, 0.0016424, 0.0043353, 0.0043353, 0.0043353
- 177, 0.027251, 0.028037, 0.0054986, 0.97271, 0.96354, 0.96646, 0.68557, 0.026387, 0.022748, 0.0016146, 0.0042899, 0.0042899, 0.0042899
- 178, 0.026909, 0.026743, 0.0046035, 0.98252, 0.97027, 0.97551, 0.66755, 0.026705, 0.022883, 0.0016144, 0.0042445, 0.0042445, 0.0042445
- 179, 0.026095, 0.026161, 0.0058214, 0.98155, 0.97028, 0.96818, 0.66911, 0.025493, 0.023625, 0.0016812, 0.0041994, 0.0041994, 0.0041994
- 180, 0.024472, 0.026628, 0.0041876, 0.98266, 0.97705, 0.97576, 0.66959, 0.024833, 0.022997, 0.0017462, 0.0041543, 0.0041543, 0.0041543
- 181, 0.027072, 0.027344, 0.0044676, 0.98132, 0.97705, 0.9754, 0.68045, 0.024837, 0.022527, 0.0017458, 0.0041094, 0.0041094, 0.0041094
- 182, 0.028166, 0.02681, 0.0042947, 0.98137, 0.9703, 0.9683, 0.68976, 0.024242, 0.022963, 0.001793, 0.0040647, 0.0040647, 0.0040647
- 183, 0.026102, 0.027943, 0.0043331, 0.95813, 0.97705, 0.97464, 0.69977, 0.023437, 0.022746, 0.0018653, 0.0040201, 0.0040201, 0.0040201
- 184, 0.026373, 0.026178, 0.0037455, 0.98558, 0.96354, 0.97444, 0.69813, 0.024044, 0.022799, 0.0018616, 0.0039757, 0.0039757, 0.0039757
- 185, 0.028673, 0.026108, 0.0044021, 0.98181, 0.95199, 0.96343, 0.67845, 0.024732, 0.023188, 0.0018667, 0.0039314, 0.0039314, 0.0039314
- 186, 0.026675, 0.02758, 0.0041627, 0.98565, 0.96353, 0.96589, 0.68148, 0.022764, 0.022821, 0.001741, 0.0038873, 0.0038873, 0.0038873
- 187, 0.026643, 0.027148, 0.0038995, 0.98353, 0.97028, 0.96679, 0.68438, 0.02252, 0.022897, 0.0017302, 0.0038434, 0.0038434, 0.0038434
- 188, 0.027608, 0.027644, 0.0039359, 0.98275, 0.977, 0.97892, 0.69636, 0.023269, 0.022497, 0.0018708, 0.0037997, 0.0037997, 0.0037997
- 189, 0.024131, 0.027909, 0.0027875, 0.97406, 0.9703, 0.97597, 0.69888, 0.023948, 0.022371, 0.0023066, 0.0037562, 0.0037562, 0.0037562
- 190, 0.027156, 0.027026, 0.0036558, 0.98347, 0.96347, 0.9715, 0.68745, 0.023983, 0.023429, 0.0027685, 0.0037128, 0.0037128, 0.0037128
- 191, 0.027734, 0.026852, 0.0039689, 0.97298, 0.97025, 0.9738, 0.6853, 0.026086, 0.022382, 0.0022475, 0.0036697, 0.0036697, 0.0036697
- 192, 0.026927, 0.026752, 0.0037148, 0.96858, 0.96354, 0.96962, 0.69858, 0.023535, 0.022065, 0.0017252, 0.0036267, 0.0036267, 0.0036267
- 193, 0.027003, 0.027176, 0.0053776, 0.96122, 0.97705, 0.97883, 0.66762, 0.023695, 0.022581, 0.0018148, 0.003584, 0.003584, 0.003584
- 194, 0.026989, 0.027615, 0.006495, 0.95862, 0.95678, 0.96378, 0.61374, 0.02806, 0.024838, 0.0017687, 0.0035415, 0.0035415, 0.0035415
- 195, 0.027666, 0.026871, 0.0057181, 0.96489, 0.9702, 0.96448, 0.66116, 0.024083, 0.024089, 0.0018062, 0.0034991, 0.0034991, 0.0034991
- 196, 0.026176, 0.02691, 0.004667, 0.97361, 0.96348, 0.96482, 0.67681, 0.024865, 0.023765, 0.0019973, 0.003457, 0.003457, 0.003457
- 197, 0.026469, 0.027627, 0.0049022, 0.96453, 0.96354, 0.97173, 0.68511, 0.024681, 0.022624, 0.0021242, 0.0034152, 0.0034152, 0.0034152
- 198, 0.027208, 0.028003, 0.0049884, 0.97647, 0.96354, 0.96577, 0.69568, 0.024119, 0.022065, 0.0021831, 0.0033735, 0.0033735, 0.0033735
- 199, 0.025903, 0.027341, 0.0048099, 0.98137, 0.95876, 0.96996, 0.69246, 0.024701, 0.022356, 0.0023582, 0.0033321, 0.0033321, 0.0033321
- 200, 0.026184, 0.027374, 0.0042712, 0.98338, 0.9635, 0.96994, 0.67492, 0.025071, 0.022943, 0.0024592, 0.0032909, 0.0032909, 0.0032909
- 201, 0.026189, 0.025554, 0.0040891, 0.98737, 0.94994, 0.96182, 0.66253, 0.025125, 0.023302, 0.0023766, 0.00325, 0.00325, 0.00325
- 202, 0.024545, 0.026731, 0.0041204, 0.9815, 0.9703, 0.97592, 0.68519, 0.024929, 0.022513, 0.0020454, 0.0032093, 0.0032093, 0.0032093
- 203, 0.02617, 0.025825, 0.0042871, 0.95509, 0.97705, 0.97726, 0.68377, 0.024432, 0.022358, 0.0020345, 0.0031689, 0.0031689, 0.0031689
- 204, 0.023137, 0.024813, 0.0036278, 0.96776, 0.96354, 0.97128, 0.69433, 0.026057, 0.022551, 0.0019471, 0.0031287, 0.0031287, 0.0031287
- 205, 0.025338, 0.025502, 0.0037127, 0.99338, 0.95089, 0.96514, 0.68198, 0.025945, 0.023259, 0.0021286, 0.0030888, 0.0030888, 0.0030888
- 206, 0.026339, 0.02602, 0.0039489, 0.98518, 0.97028, 0.96743, 0.67505, 0.023719, 0.022723, 0.0020737, 0.0030491, 0.0030491, 0.0030491
- 207, 0.026491, 0.027071, 0.0040128, 0.98605, 0.96354, 0.96766, 0.68313, 0.024904, 0.022284, 0.0022663, 0.0030097, 0.0030097, 0.0030097
- 208, 0.025094, 0.025137, 0.0043872, 0.99331, 0.9505, 0.96795, 0.6957, 0.024963, 0.021901, 0.0026323, 0.0029706, 0.0029706, 0.0029706
- 209, 0.026184, 0.027171, 0.0039022, 0.9868, 0.95678, 0.96685, 0.69064, 0.026298, 0.022596, 0.0027955, 0.0029318, 0.0029318, 0.0029318
- 210, 0.025956, 0.025668, 0.0049788, 0.97688, 0.95678, 0.97237, 0.69002, 0.025732, 0.022511, 0.0025778, 0.0028932, 0.0028932, 0.0028932
- 211, 0.027297, 0.025791, 0.0040839, 0.98462, 0.9703, 0.96931, 0.6969, 0.026088, 0.0223, 0.0022371, 0.002855, 0.002855, 0.002855
- 212, 0.02525, 0.026303, 0.0047559, 0.9774, 0.96349, 0.96719, 0.69013, 0.025161, 0.022704, 0.0021132, 0.002817, 0.002817, 0.002817
- 213, 0.024295, 0.026973, 0.0041341, 0.97281, 0.97705, 0.9826, 0.68997, 0.024569, 0.022605, 0.0019869, 0.0027793, 0.0027793, 0.0027793
- 214, 0.024136, 0.025274, 0.0038694, 0.97589, 0.94326, 0.97578, 0.68725, 0.02548, 0.022043, 0.0018324, 0.0027419, 0.0027419, 0.0027419
- 215, 0.025528, 0.027067, 0.0040959, 0.96603, 0.9567, 0.96499, 0.68876, 0.024627, 0.022841, 0.0020294, 0.0027048, 0.0027048, 0.0027048
- 216, 0.025221, 0.027184, 0.0047706, 0.95868, 0.96353, 0.96453, 0.6809, 0.025527, 0.022776, 0.0021757, 0.0026681, 0.0026681, 0.0026681
- 217, 0.024044, 0.024836, 0.0042798, 0.98084, 0.95673, 0.96482, 0.68198, 0.025761, 0.022618, 0.002021, 0.0026316, 0.0026316, 0.0026316
- 218, 0.025253, 0.027373, 0.0041113, 0.96325, 0.9689, 0.97805, 0.69718, 0.025244, 0.021851, 0.0018038, 0.0025954, 0.0025954, 0.0025954
- 219, 0.025786, 0.024412, 0.0038547, 0.9784, 0.96354, 0.97334, 0.67628, 0.024993, 0.022038, 0.001677, 0.0025596, 0.0025596, 0.0025596
- 220, 0.024866, 0.025262, 0.0039628, 0.97738, 0.96354, 0.97295, 0.67586, 0.025099, 0.02182, 0.0016662, 0.0025241, 0.0025241, 0.0025241
- 221, 0.025464, 0.027381, 0.0037889, 0.95635, 0.97015, 0.96925, 0.70037, 0.024523, 0.021997, 0.0017885, 0.0024889, 0.0024889, 0.0024889
- 222, 0.024976, 0.025851, 0.0034427, 0.95665, 0.96354, 0.96272, 0.70145, 0.024242, 0.021824, 0.0018279, 0.0024541, 0.0024541, 0.0024541
- 223, 0.024802, 0.02694, 0.0031541, 0.95601, 0.96294, 0.9618, 0.68561, 0.024934, 0.022417, 0.0018971, 0.0024195, 0.0024195, 0.0024195
- 224, 0.024682, 0.026038, 0.0032441, 0.97713, 0.96354, 0.97524, 0.68246, 0.026721, 0.022906, 0.0020948, 0.0023854, 0.0023854, 0.0023854
- 225, 0.025083, 0.026697, 0.0037998, 0.96721, 0.9703, 0.97428, 0.68679, 0.02599, 0.022761, 0.0020577, 0.0023515, 0.0023515, 0.0023515
- 226, 0.024088, 0.025932, 0.0035885, 0.96876, 0.97703, 0.97508, 0.68276, 0.024445, 0.022962, 0.0019322, 0.002318, 0.002318, 0.002318
- 227, 0.023332, 0.025505, 0.0037625, 0.96578, 0.97705, 0.97358, 0.68462, 0.024101, 0.02255, 0.0018148, 0.0022849, 0.0022849, 0.0022849
- 228, 0.024702, 0.024819, 0.0034758, 0.97385, 0.97028, 0.97462, 0.69212, 0.024558, 0.022178, 0.0017297, 0.0022521, 0.0022521, 0.0022521
- 229, 0.024602, 0.025566, 0.0038347, 0.96628, 0.96353, 0.96616, 0.70351, 0.023898, 0.022227, 0.0016842, 0.0022196, 0.0022196, 0.0022196
- 230, 0.023372, 0.025582, 0.0035108, 0.98707, 0.9567, 0.96796, 0.6879, 0.024704, 0.022368, 0.0017089, 0.0021876, 0.0021876, 0.0021876
- 231, 0.024074, 0.025893, 0.0031354, 0.98694, 0.95678, 0.9676, 0.68024, 0.024659, 0.023358, 0.0017729, 0.0021558, 0.0021558, 0.0021558
- 232, 0.024966, 0.027324, 0.0032754, 0.9826, 0.95678, 0.9736, 0.70037, 0.02362, 0.022499, 0.001837, 0.0021245, 0.0021245, 0.0021245
- 233, 0.025124, 0.026055, 0.0039871, 0.9706, 0.96971, 0.97903, 0.70731, 0.0229, 0.021873, 0.0017568, 0.0020935, 0.0020935, 0.0020935
- 234, 0.022206, 0.02586, 0.0033446, 0.9787, 0.95003, 0.96954, 0.70051, 0.023775, 0.022511, 0.0017292, 0.0020629, 0.0020629, 0.0020629
- 235, 0.024355, 0.023389, 0.0040127, 0.98374, 0.9703, 0.96776, 0.68733, 0.022898, 0.022383, 0.0017637, 0.0020327, 0.0020327, 0.0020327
- 236, 0.024096, 0.026566, 0.0032116, 0.98492, 0.96354, 0.97267, 0.70113, 0.021918, 0.022037, 0.0017403, 0.0020028, 0.0020028, 0.0020028
- 237, 0.024077, 0.025841, 0.0032894, 0.97582, 0.96353, 0.967, 0.69301, 0.021952, 0.02197, 0.0017976, 0.0019734, 0.0019734, 0.0019734
- 238, 0.024347, 0.025564, 0.0039452, 0.97899, 0.96354, 0.96707, 0.69185, 0.022981, 0.022335, 0.0018357, 0.0019443, 0.0019443, 0.0019443
- 239, 0.023853, 0.024579, 0.0044756, 0.97532, 0.95678, 0.96534, 0.69215, 0.023931, 0.022646, 0.0018563, 0.0019156, 0.0019156, 0.0019156
- 240, 0.023002, 0.025647, 0.0035852, 0.97411, 0.96353, 0.97209, 0.69136, 0.023933, 0.022786, 0.0019303, 0.0018873, 0.0018873, 0.0018873
- 241, 0.023632, 0.025356, 0.0034878, 0.96367, 0.97026, 0.98007, 0.70663, 0.023831, 0.022384, 0.0019032, 0.0018594, 0.0018594, 0.0018594
- 242, 0.023527, 0.025798, 0.0036633, 0.97056, 0.96832, 0.97529, 0.70001, 0.024231, 0.022414, 0.001796, 0.0018319, 0.0018319, 0.0018319
- 243, 0.022682, 0.025564, 0.003487, 0.97515, 0.96351, 0.9668, 0.69187, 0.024127, 0.022944, 0.0017143, 0.0018048, 0.0018048, 0.0018048
- 244, 0.024222, 0.026106, 0.0035024, 0.97655, 0.95675, 0.96682, 0.69463, 0.023624, 0.022958, 0.0016919, 0.0017781, 0.0017781, 0.0017781
- 245, 0.02326, 0.025099, 0.0029967, 0.96808, 0.97681, 0.97562, 0.70458, 0.023273, 0.02276, 0.0016949, 0.0017519, 0.0017519, 0.0017519
- 246, 0.024062, 0.024739, 0.0040586, 0.96483, 0.9635, 0.97182, 0.69647, 0.023717, 0.022898, 0.0017371, 0.001726, 0.001726, 0.001726
- 247, 0.023201, 0.0253, 0.0032933, 0.97972, 0.95633, 0.97253, 0.69153, 0.024038, 0.022889, 0.0017084, 0.0017005, 0.0017005, 0.0017005
- 248, 0.024654, 0.026136, 0.0033753, 0.98866, 0.95667, 0.97459, 0.68796, 0.023902, 0.022352, 0.0017804, 0.0016755, 0.0016755, 0.0016755
- 249, 0.023838, 0.025222, 0.0033712, 0.96588, 0.9703, 0.97386, 0.69894, 0.023947, 0.022392, 0.0018015, 0.0016509, 0.0016509, 0.0016509
- 250, 0.023668, 0.024787, 0.0034169, 0.98732, 0.95003, 0.96765, 0.69254, 0.023956, 0.022749, 0.0017763, 0.0016267, 0.0016267, 0.0016267
- 251, 0.022859, 0.025103, 0.003568, 0.95814, 0.97702, 0.9737, 0.70092, 0.023604, 0.022479, 0.0017848, 0.0016029, 0.0016029, 0.0016029
- 252, 0.022666, 0.024463, 0.0032009, 0.98704, 0.97027, 0.97466, 0.69009, 0.023513, 0.022304, 0.0017728, 0.0015795, 0.0015795, 0.0015795
- 253, 0.023492, 0.026417, 0.0028279, 0.96436, 0.98372, 0.98019, 0.69935, 0.023358, 0.021836, 0.00174, 0.0015566, 0.0015566, 0.0015566
- 254, 0.024491, 0.025485, 0.002979, 0.9853, 0.95678, 0.96646, 0.69592, 0.023924, 0.022304, 0.0018352, 0.0015341, 0.0015341, 0.0015341
- 255, 0.02484, 0.025362, 0.0035361, 0.96452, 0.96353, 0.9651, 0.69518, 0.024445, 0.022635, 0.0018837, 0.0015121, 0.0015121, 0.0015121
- 256, 0.023908, 0.025521, 0.0036297, 0.96519, 0.96354, 0.96511, 0.6864, 0.024269, 0.022565, 0.0018298, 0.0014905, 0.0014905, 0.0014905
- 257, 0.02373, 0.025435, 0.0035398, 0.97944, 0.97703, 0.98018, 0.69367, 0.023299, 0.022476, 0.001668, 0.0014693, 0.0014693, 0.0014693
- 258, 0.023375, 0.025846, 0.0030582, 0.98528, 0.97531, 0.97812, 0.69421, 0.023276, 0.022128, 0.0015514, 0.0014486, 0.0014486, 0.0014486
- 259, 0.021545, 0.024249, 0.0026146, 0.97663, 0.97029, 0.97653, 0.71099, 0.023939, 0.022179, 0.0015795, 0.0014283, 0.0014283, 0.0014283
- 260, 0.022169, 0.025532, 0.0040977, 0.97732, 0.9703, 0.97464, 0.68688, 0.024342, 0.022362, 0.001622, 0.0014084, 0.0014084, 0.0014084
- 261, 0.022755, 0.024997, 0.0032319, 0.97619, 0.9703, 0.97406, 0.70667, 0.024472, 0.021516, 0.0016024, 0.001389, 0.001389, 0.001389
- 262, 0.023288, 0.02633, 0.0034072, 0.97402, 0.97705, 0.97597, 0.70608, 0.023844, 0.021676, 0.0016408, 0.0013701, 0.0013701, 0.0013701
- 263, 0.02379, 0.025776, 0.0036441, 0.97543, 0.98358, 0.98268, 0.70729, 0.024337, 0.022026, 0.0016763, 0.0013516, 0.0013516, 0.0013516
- 264, 0.02391, 0.024676, 0.0036971, 0.97962, 0.97023, 0.98219, 0.72072, 0.024265, 0.021404, 0.0017216, 0.0013336, 0.0013336, 0.0013336
- 265, 0.02313, 0.024861, 0.0031131, 0.97831, 0.97705, 0.9824, 0.71233, 0.023289, 0.021431, 0.001778, 0.001316, 0.001316, 0.001316
- 266, 0.022911, 0.023178, 0.0040326, 0.9855, 0.95678, 0.97393, 0.70797, 0.023489, 0.021917, 0.001843, 0.0012989, 0.0012989, 0.0012989
- 267, 0.022923, 0.025628, 0.0032744, 0.98466, 0.95676, 0.97389, 0.70614, 0.023732, 0.021756, 0.0018387, 0.0012822, 0.0012822, 0.0012822
- 268, 0.021734, 0.024794, 0.0037717, 0.97172, 0.9703, 0.9748, 0.69889, 0.023854, 0.021882, 0.0018406, 0.001266, 0.001266, 0.001266
- 269, 0.023233, 0.023997, 0.0026434, 0.98878, 0.95002, 0.97413, 0.69813, 0.024157, 0.022212, 0.0018839, 0.0012503, 0.0012503, 0.0012503
- 270, 0.022645, 0.024259, 0.0028535, 0.9733, 0.9703, 0.97535, 0.70777, 0.024298, 0.021893, 0.001847, 0.001235, 0.001235, 0.001235
- 271, 0.022842, 0.025684, 0.003931, 0.97335, 0.9703, 0.97546, 0.6987, 0.023966, 0.022058, 0.0018554, 0.0012202, 0.0012202, 0.0012202
- 272, 0.022658, 0.02243, 0.0029644, 0.98127, 0.97703, 0.97619, 0.70566, 0.024319, 0.022133, 0.0018315, 0.0012059, 0.0012059, 0.0012059
- 273, 0.021985, 0.023866, 0.003224, 0.97334, 0.97028, 0.97532, 0.71404, 0.02463, 0.021925, 0.0017855, 0.0011921, 0.0011921, 0.0011921
- 274, 0.021942, 0.025971, 0.0030934, 0.9921, 0.94045, 0.96804, 0.70548, 0.023867, 0.02181, 0.0017593, 0.0011787, 0.0011787, 0.0011787
- 275, 0.022654, 0.025224, 0.002868, 0.97576, 0.96344, 0.98036, 0.71113, 0.023825, 0.021833, 0.001792, 0.0011658, 0.0011658, 0.0011658
- 276, 0.022061, 0.023995, 0.0044932, 0.96396, 0.97519, 0.98094, 0.70244, 0.025151, 0.022106, 0.0018909, 0.0011533, 0.0011533, 0.0011533
- 277, 0.022082, 0.024009, 0.0043146, 0.9688, 0.96354, 0.96678, 0.69519, 0.025253, 0.022238, 0.0019813, 0.0011414, 0.0011414, 0.0011414
- 278, 0.022718, 0.025438, 0.0033991, 0.98149, 0.97029, 0.96863, 0.69842, 0.024404, 0.021862, 0.0021195, 0.0011299, 0.0011299, 0.0011299
- 279, 0.021459, 0.024987, 0.0033223, 0.98556, 0.96354, 0.97556, 0.70391, 0.024428, 0.021777, 0.002116, 0.0011189, 0.0011189, 0.0011189
- 280, 0.022531, 0.025328, 0.0029854, 0.97082, 0.97026, 0.98069, 0.70413, 0.024501, 0.021852, 0.0020207, 0.0011084, 0.0011084, 0.0011084
- 281, 0.021432, 0.02498, 0.0037385, 0.97039, 0.9703, 0.98025, 0.70643, 0.024077, 0.021808, 0.0018792, 0.0010983, 0.0010983, 0.0010983
- 282, 0.022082, 0.024033, 0.0035464, 0.97989, 0.97705, 0.98222, 0.70106, 0.023699, 0.021782, 0.0018304, 0.0010888, 0.0010888, 0.0010888
- 283, 0.022438, 0.026502, 0.0037712, 0.97219, 0.97702, 0.9805, 0.70248, 0.023944, 0.022022, 0.0018007, 0.0010797, 0.0010797, 0.0010797
- 284, 0.021952, 0.026204, 0.0030446, 0.9716, 0.977, 0.9802, 0.71073, 0.024671, 0.022283, 0.0017623, 0.0010711, 0.0010711, 0.0010711
- 285, 0.02244, 0.024696, 0.0031012, 0.97361, 0.9703, 0.98002, 0.71442, 0.024199, 0.022152, 0.0017836, 0.001063, 0.001063, 0.001063
- 286, 0.021664, 0.023039, 0.0027769, 0.97304, 0.96354, 0.97902, 0.70917, 0.023735, 0.022079, 0.0017841, 0.0010554, 0.0010554, 0.0010554
- 287, 0.022677, 0.025335, 0.0041636, 0.97759, 0.97705, 0.98093, 0.71153, 0.022869, 0.022005, 0.0017778, 0.0010483, 0.0010483, 0.0010483
- 288, 0.022281, 0.025492, 0.0036219, 0.98065, 0.97025, 0.98087, 0.70983, 0.022568, 0.022306, 0.0018028, 0.0010416, 0.0010416, 0.0010416
- 289, 0.023508, 0.024725, 0.0040105, 0.97198, 0.97023, 0.98068, 0.70539, 0.023018, 0.022493, 0.001852, 0.0010355, 0.0010355, 0.0010355
- 290, 0.023213, 0.024867, 0.0040221, 0.97374, 0.9703, 0.98036, 0.70964, 0.023247, 0.022265, 0.0018443, 0.0010298, 0.0010298, 0.0010298
- 291, 0.021429, 0.023571, 0.0036408, 0.97524, 0.96354, 0.97319, 0.7067, 0.023258, 0.022189, 0.0018254, 0.0010247, 0.0010247, 0.0010247
- 292, 0.021587, 0.024857, 0.0031796, 0.97449, 0.9703, 0.98051, 0.71474, 0.02327, 0.022178, 0.0018069, 0.00102, 0.00102, 0.00102
- 293, 0.022102, 0.02446, 0.0038188, 0.9726, 0.9703, 0.98018, 0.71203, 0.023105, 0.022171, 0.0017905, 0.0010158, 0.0010158, 0.0010158
- 294, 0.021959, 0.024979, 0.0029226, 0.98156, 0.9703, 0.97487, 0.70595, 0.022793, 0.022188, 0.0018304, 0.0010121, 0.0010121, 0.0010121
- 295, 0.021182, 0.025238, 0.0033527, 0.96627, 0.9703, 0.97301, 0.71552, 0.023089, 0.021885, 0.0018715, 0.0010089, 0.0010089, 0.0010089
- 296, 0.022339, 0.024582, 0.0034718, 0.96882, 0.97705, 0.98079, 0.719, 0.023042, 0.021523, 0.0018468, 0.0010062, 0.0010062, 0.0010062
- 297, 0.022934, 0.025444, 0.0036708, 0.97071, 0.97619, 0.9806, 0.72045, 0.023387, 0.021511, 0.0017952, 0.0010039, 0.0010039, 0.0010039
- 298, 0.022714, 0.024515, 0.004176, 0.97351, 0.97029, 0.98062, 0.71732, 0.023228, 0.021938, 0.0018586, 0.0010022, 0.0010022, 0.0010022
- 299, 0.022972, 0.026098, 0.0036222, 0.98, 0.97705, 0.98277, 0.70426, 0.023559, 0.022199, 0.0019408, 0.001001, 0.001001, 0.001001
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/results.png b/ros2_ws/src/yolov3/runs/train/exp15/results.png
deleted file mode 100644
index 9e9edcac..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/results.png and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/train_batch0.jpg b/ros2_ws/src/yolov3/runs/train/exp15/train_batch0.jpg
deleted file mode 100644
index 16a0f778..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/train_batch0.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/train_batch1.jpg b/ros2_ws/src/yolov3/runs/train/exp15/train_batch1.jpg
deleted file mode 100644
index 2f7cdf28..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/train_batch1.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/train_batch2.jpg b/ros2_ws/src/yolov3/runs/train/exp15/train_batch2.jpg
deleted file mode 100644
index 8160a8e2..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/train_batch2.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/val_batch0_labels.jpg b/ros2_ws/src/yolov3/runs/train/exp15/val_batch0_labels.jpg
deleted file mode 100644
index c6c6bf96..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/val_batch0_labels.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/val_batch0_pred.jpg b/ros2_ws/src/yolov3/runs/train/exp15/val_batch0_pred.jpg
deleted file mode 100644
index 7885c9d7..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/val_batch0_pred.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/val_batch1_labels.jpg b/ros2_ws/src/yolov3/runs/train/exp15/val_batch1_labels.jpg
deleted file mode 100644
index ebbff892..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/val_batch1_labels.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/val_batch1_pred.jpg b/ros2_ws/src/yolov3/runs/train/exp15/val_batch1_pred.jpg
deleted file mode 100644
index 3739349a..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/val_batch1_pred.jpg and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/weights/best.pt b/ros2_ws/src/yolov3/runs/train/exp15/weights/best.pt
deleted file mode 100644
index 75ed15f3..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/weights/best.pt and /dev/null differ
diff --git a/ros2_ws/src/yolov3/runs/train/exp15/weights/last.pt b/ros2_ws/src/yolov3/runs/train/exp15/weights/last.pt
deleted file mode 100644
index 65ed1364..00000000
Binary files a/ros2_ws/src/yolov3/runs/train/exp15/weights/last.pt and /dev/null differ
diff --git a/ros2_ws/src/yolov3/utils/loggers/comet/optimizer_config.json b/ros2_ws/src/yolov3/utils/loggers/comet/optimizer_config.json
deleted file mode 100644
index 83ddddab..00000000
--- a/ros2_ws/src/yolov3/utils/loggers/comet/optimizer_config.json
+++ /dev/null
@@ -1,209 +0,0 @@
-{
- "algorithm": "random",
- "parameters": {
- "anchor_t": {
- "type": "discrete",
- "values": [
- 2,
- 8
- ]
- },
- "batch_size": {
- "type": "discrete",
- "values": [
- 16,
- 32,
- 64
- ]
- },
- "box": {
- "type": "discrete",
- "values": [
- 0.02,
- 0.2
- ]
- },
- "cls": {
- "type": "discrete",
- "values": [
- 0.2
- ]
- },
- "cls_pw": {
- "type": "discrete",
- "values": [
- 0.5
- ]
- },
- "copy_paste": {
- "type": "discrete",
- "values": [
- 1
- ]
- },
- "degrees": {
- "type": "discrete",
- "values": [
- 0,
- 45
- ]
- },
- "epochs": {
- "type": "discrete",
- "values": [
- 5
- ]
- },
- "fl_gamma": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "fliplr": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "flipud": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "hsv_h": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "hsv_s": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "hsv_v": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "iou_t": {
- "type": "discrete",
- "values": [
- 0.7
- ]
- },
- "lr0": {
- "type": "discrete",
- "values": [
- 1e-05,
- 0.1
- ]
- },
- "lrf": {
- "type": "discrete",
- "values": [
- 0.01,
- 1
- ]
- },
- "mixup": {
- "type": "discrete",
- "values": [
- 1
- ]
- },
- "momentum": {
- "type": "discrete",
- "values": [
- 0.6
- ]
- },
- "mosaic": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "obj": {
- "type": "discrete",
- "values": [
- 0.2
- ]
- },
- "obj_pw": {
- "type": "discrete",
- "values": [
- 0.5
- ]
- },
- "optimizer": {
- "type": "categorical",
- "values": [
- "SGD",
- "Adam",
- "AdamW"
- ]
- },
- "perspective": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "scale": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "shear": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "translate": {
- "type": "discrete",
- "values": [
- 0
- ]
- },
- "warmup_bias_lr": {
- "type": "discrete",
- "values": [
- 0,
- 0.2
- ]
- },
- "warmup_epochs": {
- "type": "discrete",
- "values": [
- 5
- ]
- },
- "warmup_momentum": {
- "type": "discrete",
- "values": [
- 0,
- 0.95
- ]
- },
- "weight_decay": {
- "type": "discrete",
- "values": [
- 0,
- 0.001
- ]
- }
- },
- "spec": {
- "maxCombo": 0,
- "metric": "metrics/mAP_0.5",
- "objective": "maximize"
- },
- "trials": 1
-}
diff --git a/ros2_ws/src/yolov3/.dockerignore b/yolov3/.dockerignore
similarity index 100%
rename from ros2_ws/src/yolov3/.dockerignore
rename to yolov3/.dockerignore
diff --git a/ros2_ws/src/yolov3/.gitattributes b/yolov3/.gitattributes
similarity index 100%
rename from ros2_ws/src/yolov3/.gitattributes
rename to yolov3/.gitattributes
diff --git a/ros2_ws/src/yolov3/.github/ISSUE_TEMPLATE/bug-report.yml b/yolov3/.github/ISSUE_TEMPLATE/bug-report.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/ISSUE_TEMPLATE/bug-report.yml
rename to yolov3/.github/ISSUE_TEMPLATE/bug-report.yml
diff --git a/ros2_ws/src/yolov3/.github/ISSUE_TEMPLATE/config.yml b/yolov3/.github/ISSUE_TEMPLATE/config.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/ISSUE_TEMPLATE/config.yml
rename to yolov3/.github/ISSUE_TEMPLATE/config.yml
diff --git a/ros2_ws/src/yolov3/.github/ISSUE_TEMPLATE/feature-request.yml b/yolov3/.github/ISSUE_TEMPLATE/feature-request.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/ISSUE_TEMPLATE/feature-request.yml
rename to yolov3/.github/ISSUE_TEMPLATE/feature-request.yml
diff --git a/ros2_ws/src/yolov3/.github/ISSUE_TEMPLATE/question.yml b/yolov3/.github/ISSUE_TEMPLATE/question.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/ISSUE_TEMPLATE/question.yml
rename to yolov3/.github/ISSUE_TEMPLATE/question.yml
diff --git a/ros2_ws/src/yolov3/.github/PULL_REQUEST_TEMPLATE.md b/yolov3/.github/PULL_REQUEST_TEMPLATE.md
similarity index 100%
rename from ros2_ws/src/yolov3/.github/PULL_REQUEST_TEMPLATE.md
rename to yolov3/.github/PULL_REQUEST_TEMPLATE.md
diff --git a/ros2_ws/src/yolov3/.github/dependabot.yml b/yolov3/.github/dependabot.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/dependabot.yml
rename to yolov3/.github/dependabot.yml
diff --git a/ros2_ws/src/yolov3/.github/workflows/ci-testing.yml b/yolov3/.github/workflows/ci-testing.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/workflows/ci-testing.yml
rename to yolov3/.github/workflows/ci-testing.yml
diff --git a/ros2_ws/src/yolov3/.github/workflows/codeql-analysis.yml b/yolov3/.github/workflows/codeql-analysis.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/workflows/codeql-analysis.yml
rename to yolov3/.github/workflows/codeql-analysis.yml
diff --git a/ros2_ws/src/yolov3/.github/workflows/docker.yml b/yolov3/.github/workflows/docker.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/workflows/docker.yml
rename to yolov3/.github/workflows/docker.yml
diff --git a/ros2_ws/src/yolov3/.github/workflows/greetings.yml b/yolov3/.github/workflows/greetings.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/workflows/greetings.yml
rename to yolov3/.github/workflows/greetings.yml
diff --git a/ros2_ws/src/yolov3/.github/workflows/stale.yml b/yolov3/.github/workflows/stale.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/workflows/stale.yml
rename to yolov3/.github/workflows/stale.yml
diff --git a/ros2_ws/src/yolov3/.github/workflows/translate-readme.yml b/yolov3/.github/workflows/translate-readme.yml
similarity index 100%
rename from ros2_ws/src/yolov3/.github/workflows/translate-readme.yml
rename to yolov3/.github/workflows/translate-readme.yml
diff --git a/ros2_ws/src/yolov3/.gitignore b/yolov3/.gitignore
similarity index 100%
rename from ros2_ws/src/yolov3/.gitignore
rename to yolov3/.gitignore
diff --git a/ros2_ws/src/yolov3/.pre-commit-config.yaml b/yolov3/.pre-commit-config.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/.pre-commit-config.yaml
rename to yolov3/.pre-commit-config.yaml
diff --git a/ros2_ws/src/yolov3/CITATION.cff b/yolov3/CITATION.cff
similarity index 100%
rename from ros2_ws/src/yolov3/CITATION.cff
rename to yolov3/CITATION.cff
diff --git a/ros2_ws/src/yolov3/CMakeLists.txt b/yolov3/CMakeLists.txt
similarity index 100%
rename from ros2_ws/src/yolov3/CMakeLists.txt
rename to yolov3/CMakeLists.txt
diff --git a/ros2_ws/src/yolov3/CONTRIBUTING.md b/yolov3/CONTRIBUTING.md
similarity index 100%
rename from ros2_ws/src/yolov3/CONTRIBUTING.md
rename to yolov3/CONTRIBUTING.md
diff --git a/yolov3/Dockerfile b/yolov3/Dockerfile
new file mode 100644
index 00000000..12842422
--- /dev/null
+++ b/yolov3/Dockerfile
@@ -0,0 +1,61 @@
+# YOLOv3 🚀 by Ultralytics, GPL-3.0 license
+
+# Start FROM Nvidia PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch
+FROM nvcr.io/nvidia/pytorch:21.10-py3
+
+# Install linux packages
+RUN apt update && apt install -y zip htop screen libgl1-mesa-glx
+
+# Install python dependencies
+COPY requirements.txt .
+RUN python -m pip install --upgrade pip
+RUN pip uninstall -y nvidia-tensorboard nvidia-tensorboard-plugin-dlprof
+RUN pip install --no-cache -r requirements.txt coremltools onnx gsutil notebook wandb>=0.12.2
+RUN pip install --no-cache -U torch torchvision numpy Pillow
+# RUN pip install --no-cache torch==1.10.0+cu113 torchvision==0.11.1+cu113 -f https://download.pytorch.org/whl/cu113/torch_stable.html
+
+# Create working directory
+RUN mkdir -p /usr/src/app
+WORKDIR /usr/src/app
+
+# Copy contents
+COPY . /usr/src/app
+
+# Downloads to user config dir
+ADD https://ultralytics.com/assets/Arial.ttf /root/.config/Ultralytics/
+
+# Set environment variables
+# ENV HOME=/usr/src/app
+
+
+# Usage Examples -------------------------------------------------------------------------------------------------------
+
+# Build and Push
+# t=ultralytics/yolov3:latest && sudo docker build -t $t . && sudo docker push $t
+
+# Pull and Run
+# t=ultralytics/yolov3:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all $t
+
+# Pull and Run with local directory access
+# t=ultralytics/yolov3:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all -v "$(pwd)"/datasets:/usr/src/datasets $t
+
+# Kill all
+# sudo docker kill $(sudo docker ps -q)
+
+# Kill all image-based
+# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov3:latest)
+
+# Bash into running container
+# sudo docker exec -it 5a9b5863d93d bash
+
+# Bash into stopped container
+# id=$(sudo docker ps -qa) && sudo docker start $id && sudo docker exec -it $id bash
+
+# Clean up
+# docker system prune -a --volumes
+
+# Update Ubuntu drivers
+# https://www.maketecheasier.com/install-nvidia-drivers-ubuntu/
+
+# DDP test
+# python -m torch.distributed.run --nproc_per_node 2 --master_port 1 train.py --epochs 3
diff --git a/ros2_ws/src/yolov3/LICENSE b/yolov3/LICENSE
similarity index 100%
rename from ros2_ws/src/yolov3/LICENSE
rename to yolov3/LICENSE
diff --git a/ros2_ws/src/yolov3/README.md b/yolov3/README.md
similarity index 100%
rename from ros2_ws/src/yolov3/README.md
rename to yolov3/README.md
diff --git a/ros2_ws/src/yolov3/README.zh-CN.md b/yolov3/README.zh-CN.md
similarity index 100%
rename from ros2_ws/src/yolov3/README.zh-CN.md
rename to yolov3/README.zh-CN.md
diff --git a/ros2_ws/src/yolov3/benchmarks.py b/yolov3/benchmarks.py
similarity index 100%
rename from ros2_ws/src/yolov3/benchmarks.py
rename to yolov3/benchmarks.py
diff --git a/ros2_ws/src/yolov3/classify/predict.py b/yolov3/classify/predict.py
similarity index 100%
rename from ros2_ws/src/yolov3/classify/predict.py
rename to yolov3/classify/predict.py
diff --git a/ros2_ws/src/yolov3/classify/train.py b/yolov3/classify/train.py
similarity index 100%
rename from ros2_ws/src/yolov3/classify/train.py
rename to yolov3/classify/train.py
diff --git a/ros2_ws/src/yolov3/classify/tutorial.ipynb b/yolov3/classify/tutorial.ipynb
similarity index 100%
rename from ros2_ws/src/yolov3/classify/tutorial.ipynb
rename to yolov3/classify/tutorial.ipynb
diff --git a/ros2_ws/src/yolov3/classify/val.py b/yolov3/classify/val.py
similarity index 100%
rename from ros2_ws/src/yolov3/classify/val.py
rename to yolov3/classify/val.py
diff --git a/yolov3/convert_pt_to_weight.py b/yolov3/convert_pt_to_weight.py
new file mode 100644
index 00000000..265d4992
--- /dev/null
+++ b/yolov3/convert_pt_to_weight.py
@@ -0,0 +1,33 @@
+import torch
+from models.yolo import *
+
+# Define the YOLOv3 model
+# model = YOLO(num_classes=80)
+model = Model('models/yolov3.yaml')
+
+# Load the PyTorch .pt file
+model.load_state_dict(torch.load('/home/parallels/ros2_ws/src/darknet_ros_fp16/darknet_ros/darknet_ros/yolo_network_config/weights/pipe_yolo3.pt'))
+
+# Create a dictionary of layer names and weights
+layer_weights = {}
+for name, param in model.named_parameters():
+ if name.endswith('.bias'):
+ continue
+ layer_name = name.rsplit('.', 1)[0]
+ if layer_name not in layer_weights:
+ layer_weights[layer_name] = []
+ layer_weights[layer_name].append(param.detach().cpu().numpy())
+
+# Write the weights to a binary file in Darknet's .weights format
+with open('yolov3_pipe.weights', 'wb') as f:
+ for layer_name, weights in layer_weights.items():
+ header = [0, 0, 0, 0]
+ header[0] = weights[0].shape[0] # Number of filters
+ header[1] = weights[0].shape[1] # Number of channels
+ header[2] = weights[0].shape[2] # Filter height
+ header[3] = weights[0].shape[3] # Filter width
+ f.write(bytes(header))
+
+ for w in weights:
+ w = w.flatten()
+ f.write(w.tobytes())
diff --git a/ros2_ws/src/yolov3/data/Argoverse.yaml b/yolov3/data/Argoverse.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/Argoverse.yaml
rename to yolov3/data/Argoverse.yaml
diff --git a/ros2_ws/src/yolov3/data/GlobalWheat2020.yaml b/yolov3/data/GlobalWheat2020.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/GlobalWheat2020.yaml
rename to yolov3/data/GlobalWheat2020.yaml
diff --git a/ros2_ws/src/yolov3/data/ImageNet.yaml b/yolov3/data/ImageNet.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/ImageNet.yaml
rename to yolov3/data/ImageNet.yaml
diff --git a/ros2_ws/src/yolov3/data/SKU-110K.yaml b/yolov3/data/SKU-110K.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/SKU-110K.yaml
rename to yolov3/data/SKU-110K.yaml
diff --git a/ros2_ws/src/yolov3/data/VisDrone.yaml b/yolov3/data/VisDrone.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/VisDrone.yaml
rename to yolov3/data/VisDrone.yaml
diff --git a/ros2_ws/src/yolov3/data/coco.yaml b/yolov3/data/coco.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/coco.yaml
rename to yolov3/data/coco.yaml
diff --git a/ros2_ws/src/yolov3/data/coco128-seg.yaml b/yolov3/data/coco128-seg.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/coco128-seg.yaml
rename to yolov3/data/coco128-seg.yaml
diff --git a/ros2_ws/src/yolov3/data/coco128.yaml b/yolov3/data/coco128.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/coco128.yaml
rename to yolov3/data/coco128.yaml
diff --git a/ros2_ws/src/yolov3/data/custom-yolov3.yaml b/yolov3/data/custom-yolov3.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/custom-yolov3.yaml
rename to yolov3/data/custom-yolov3.yaml
diff --git a/ros2_ws/src/yolov3/data/hyps/hyp.Objects365.yaml b/yolov3/data/hyps/hyp.Objects365.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/hyps/hyp.Objects365.yaml
rename to yolov3/data/hyps/hyp.Objects365.yaml
diff --git a/ros2_ws/src/yolov3/data/hyps/hyp.VOC.yaml b/yolov3/data/hyps/hyp.VOC.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/hyps/hyp.VOC.yaml
rename to yolov3/data/hyps/hyp.VOC.yaml
diff --git a/ros2_ws/src/yolov3/data/hyps/hyp.no-augmentation.yaml b/yolov3/data/hyps/hyp.no-augmentation.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/hyps/hyp.no-augmentation.yaml
rename to yolov3/data/hyps/hyp.no-augmentation.yaml
diff --git a/ros2_ws/src/yolov3/data/hyps/hyp.scratch-high.yaml b/yolov3/data/hyps/hyp.scratch-high.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/hyps/hyp.scratch-high.yaml
rename to yolov3/data/hyps/hyp.scratch-high.yaml
diff --git a/ros2_ws/src/yolov3/data/hyps/hyp.scratch-low.yaml b/yolov3/data/hyps/hyp.scratch-low.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/hyps/hyp.scratch-low.yaml
rename to yolov3/data/hyps/hyp.scratch-low.yaml
diff --git a/ros2_ws/src/yolov3/data/hyps/hyp.scratch-med.yaml b/yolov3/data/hyps/hyp.scratch-med.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/hyps/hyp.scratch-med.yaml
rename to yolov3/data/hyps/hyp.scratch-med.yaml
diff --git a/ros2_ws/src/yolov3/data/hyps/hyp.scratch.yaml b/yolov3/data/hyps/hyp.scratch.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/hyps/hyp.scratch.yaml
rename to yolov3/data/hyps/hyp.scratch.yaml
diff --git a/ros2_ws/src/yolov3/data/images/bus.jpg b/yolov3/data/images/bus.jpg
similarity index 100%
rename from ros2_ws/src/yolov3/data/images/bus.jpg
rename to yolov3/data/images/bus.jpg
diff --git a/ros2_ws/src/yolov3/data/images/zidane.jpg b/yolov3/data/images/zidane.jpg
similarity index 100%
rename from ros2_ws/src/yolov3/data/images/zidane.jpg
rename to yolov3/data/images/zidane.jpg
diff --git a/ros2_ws/src/yolov3/data/objects365.yaml b/yolov3/data/objects365.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/objects365.yaml
rename to yolov3/data/objects365.yaml
diff --git a/ros2_ws/src/yolov3/data/scripts/download_weights.sh b/yolov3/data/scripts/download_weights.sh
similarity index 100%
rename from ros2_ws/src/yolov3/data/scripts/download_weights.sh
rename to yolov3/data/scripts/download_weights.sh
diff --git a/ros2_ws/src/yolov3/data/scripts/get_coco.sh b/yolov3/data/scripts/get_coco.sh
similarity index 100%
rename from ros2_ws/src/yolov3/data/scripts/get_coco.sh
rename to yolov3/data/scripts/get_coco.sh
diff --git a/ros2_ws/src/yolov3/data/scripts/get_coco128.sh b/yolov3/data/scripts/get_coco128.sh
similarity index 100%
rename from ros2_ws/src/yolov3/data/scripts/get_coco128.sh
rename to yolov3/data/scripts/get_coco128.sh
diff --git a/ros2_ws/src/yolov3/data/scripts/get_imagenet.sh b/yolov3/data/scripts/get_imagenet.sh
similarity index 100%
rename from ros2_ws/src/yolov3/data/scripts/get_imagenet.sh
rename to yolov3/data/scripts/get_imagenet.sh
diff --git a/ros2_ws/src/yolov3/data/voc.yaml b/yolov3/data/voc.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/voc.yaml
rename to yolov3/data/voc.yaml
diff --git a/ros2_ws/src/yolov3/data/xView.yaml b/yolov3/data/xView.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/data/xView.yaml
rename to yolov3/data/xView.yaml
diff --git a/ros2_ws/src/yolov3/detect.py b/yolov3/detect.py
similarity index 100%
rename from ros2_ws/src/yolov3/detect.py
rename to yolov3/detect.py
diff --git a/yolov3/detect_oj.py b/yolov3/detect_oj.py
new file mode 100644
index 00000000..37356fa6
--- /dev/null
+++ b/yolov3/detect_oj.py
@@ -0,0 +1,248 @@
+# YOLOv3 🚀 by Ultralytics, GPL-3.0 license
+"""
+Run inference on images, videos, directories, streams, etc.
+
+Usage:
+ $ python path/to/detect.py --weights yolov3.pt --source 0 # webcam
+ img.jpg # image
+ vid.mp4 # video
+ path/ # directory
+ path/*.jpg # glob
+ 'https://youtu.be/Zgi9g1ksQHc' # YouTube
+ 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
+"""
+
+import argparse
+import os
+import sys
+from pathlib import Path
+
+import cv2
+import torch
+import torch.backends.cudnn as cudnn
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[0] # root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
+
+from models.common import DetectMultiBackend
+from utils.datasets import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
+from utils.general import (LOGGER, check_file, check_img_size, check_imshow, check_requirements, colorstr,
+ increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
+from utils.plots import Annotator, colors, save_one_box
+from utils.torch_utils import select_device, time_sync
+
+
+@torch.no_grad()
+def run(weights=ROOT / 'yolov3.pt', # model.pt path(s)
+ source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
+ imgsz=1280, # inference size (pixels)
+ conf_thres=0.25, # confidence threshold
+ iou_thres=0.45, # NMS IOU threshold
+ max_det=1000, # maximum detections per image
+ device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
+ view_img=True, # show results
+ save_txt=False, # save results to *.txt
+ save_conf=False, # save confidences in --save-txt labels
+ save_crop=False, # save cropped prediction boxes
+ nosave=False, # do not save images/videos
+ classes=None, # filter by class: --class 0, or --class 0 2 3
+ agnostic_nms=False, # class-agnostic NMS
+ augment=False, # augmented inference
+ visualize=False, # visualize features
+ update=False, # update all models
+ project=ROOT / 'runs/detect', # save results to project/name
+ name='exp', # save results to project/name
+ exist_ok=False, # existing project/name ok, do not increment
+ line_thickness=3, # bounding box thickness (pixels)
+ hide_labels=False, # hide labels
+ hide_conf=False, # hide confidences
+ half=False, # use FP16 half-precision inference
+ dnn=False, # use OpenCV DNN for ONNX inference
+ ):
+
+ source = str(source)
+ save_img = not nosave and not source.endswith('.txt') # save inference images
+ is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
+ is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))
+ webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file)
+ if is_url and is_file:
+ source = check_file(source) # download
+
+ # Directories
+ save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
+ (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
+
+ # Load model
+ device = select_device(device)
+ model = DetectMultiBackend(weights, device=device, dnn=dnn)
+ stride, names, pt, jit, onnx = model.stride, model.names, model.pt, model.jit, model.onnx
+ imgsz = check_img_size(imgsz, s=stride) # check image size
+
+ # Half
+ half &= pt and device.type != 'cpu' # half precision only supported by PyTorch on CUDA
+ if pt:
+ model.model.half() if half else model.model.float()
+ # Dataloader
+ if webcam:
+ view_img = check_imshow()
+ cudnn.benchmark = True # set True to speed up constant image size inference
+ dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt and not jit)
+ bs = len(dataset) # batch_size
+ else:
+ print("in load images")
+ dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt and not jit)
+ bs = 1 # batch_size
+ vid_path, vid_writer = [None] * bs, [None] * bs
+
+ # Run inference
+ if pt and device.type != 'cpu':
+ model(torch.zeros(1, 3, *imgsz).to(device).type_as(next(model.model.parameters()))) # warmup
+ dt, seen = [0.0, 0.0, 0.0], 0
+
+ # Inference
+ for path, im, im0s, vid_cap, s in dataset:
+ t1 = time_sync()
+ im = torch.from_numpy(im).to(device)
+ im = im.half() if half else im.float() # uint8 to fp16/32
+ im /= 255 # 0 - 255 to 0.0 - 1.0
+ if len(im.shape) == 3:
+ im = im[None] # expand for batch dim
+ t2 = time_sync()
+ dt[0] += t2 - t1
+
+ # Inference
+ visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
+ pred = model(im, augment=augment, visualize=visualize)
+ t3 = time_sync()
+ dt[1] += t3 - t2
+
+ # NMS
+ pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
+ dt[2] += time_sync() - t3
+
+ # Second-stage classifier (optional)
+ # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
+
+ # Process predictions
+ for i, det in enumerate(pred): # per image
+ seen += 1
+ if webcam: # batch_size >= 1
+ p, im0, frame = path[i], im0s[i].copy(), dataset.count
+ s += f'{i}: '
+ else:
+ p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0)
+
+ p = Path(p) # to Path
+ save_path = str(save_dir / p.name) # im.jpg
+ txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt
+ s += '%gx%g ' % im.shape[2:] # print string
+ gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
+ imc = im0.copy() if save_crop else im0 # for save_crop
+ annotator = Annotator(im0, line_width=line_thickness, example=str(names))
+ if len(det):
+ # Rescale boxes from img_size to im0 size
+ det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
+
+ # Print results
+ for c in det[:, -1].unique():
+ n = (det[:, -1] == c).sum() # detections per class
+ s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
+
+ # Write results
+ for *xyxy, conf, cls in reversed(det):
+ if save_txt: # Write to file
+ xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
+ line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
+ with open(txt_path + '.txt', 'a') as f:
+ f.write(('%g ' * len(line)).rstrip() % line + '\n')
+
+ if save_img or save_crop or view_img: # Add bbox to image
+ c = int(cls) # integer class
+ label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
+ annotator.box_label(xyxy, label, color=colors(c, True))
+ if save_crop:
+ save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)
+
+ # Print time (inference-only)
+ LOGGER.info(f'{s}Done. ({t3 - t2:.3f}s)')
+ import pdb; pdb.set_trace()
+
+ # Stream results
+ im0 = annotator.result()
+ if True:
+ cv2.imshow(str(p), im0)
+ cv2.waitKey(1) # 1 millisecond
+
+ # Save results (image with detections)
+ if save_img:
+ if dataset.mode == 'image':
+ cv2.imwrite(save_path, im0)
+ else: # 'video' or 'stream'
+ if vid_path[i] != save_path: # new video
+ vid_path[i] = save_path
+ if isinstance(vid_writer[i], cv2.VideoWriter):
+ vid_writer[i].release() # release previous video writer
+ if vid_cap: # video
+ fps = vid_cap.get(cv2.CAP_PROP_FPS)
+ w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ else: # stream
+ fps, w, h = 30, im0.shape[1], im0.shape[0]
+ save_path += '.mp4'
+ vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
+ vid_writer[i].write(im0)
+
+ # Print results
+ t = tuple(x / seen * 1E3 for x in dt) # speeds per image
+ LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t)
+ if save_txt or save_img:
+ s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
+ LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
+ if update:
+ strip_optimizer(weights) # update model (to fix SourceChangeWarning)
+
+
+def parse_opt():
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov3.pt', help='model path(s)')
+ parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
+ parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
+ parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
+ parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
+ parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
+ parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
+ parser.add_argument('--view-img', action='store_true', help='show results')
+ parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
+ parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
+ parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
+ parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
+ parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
+ parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
+ parser.add_argument('--augment', action='store_true', help='augmented inference')
+ parser.add_argument('--visualize', action='store_true', help='visualize features')
+ parser.add_argument('--update', action='store_true', help='update all models')
+ parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name')
+ parser.add_argument('--name', default='exp', help='save results to project/name')
+ parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
+ parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
+ parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
+ parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
+ parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
+ parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
+ opt = parser.parse_args()
+ opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
+ print_args(FILE.stem, opt)
+ return opt
+
+
+def main(opt):
+ check_requirements(exclude=('tensorboard', 'thop'))
+ run(**vars(opt))
+
+
+if __name__ == "__main__":
+ opt = parse_opt()
+ main(opt)
diff --git a/ros2_ws/src/yolov3/detect_on_bag.py b/yolov3/detect_on_bag.py
similarity index 100%
rename from ros2_ws/src/yolov3/detect_on_bag.py
rename to yolov3/detect_on_bag.py
diff --git a/ros2_ws/src/yolov3/export.py b/yolov3/export.py
similarity index 100%
rename from ros2_ws/src/yolov3/export.py
rename to yolov3/export.py
diff --git a/ros2_ws/src/yolov3/hubconf.py b/yolov3/hubconf.py
similarity index 100%
rename from ros2_ws/src/yolov3/hubconf.py
rename to yolov3/hubconf.py
diff --git a/yolov3/launch/pipe_detection.launch.py b/yolov3/launch/pipe_detection.launch.py
new file mode 100644
index 00000000..2a78a60b
--- /dev/null
+++ b/yolov3/launch/pipe_detection.launch.py
@@ -0,0 +1,33 @@
+
+from launch import LaunchDescription
+from launch.actions import DeclareLaunchArgument, SetEnvironmentVariable
+from launch.substitutions import LaunchConfiguration
+from launch_ros.actions import Node
+
+def generate_launch_description():
+
+ return LaunchDescription([
+
+ # SetEnvironmentVariable('RCUTILS_LOGGING_USE_STDOUT', '1'),
+ # SetEnvironmentVariable('RCUTILS_LOGGING_BUFFERED_STREAM', '0'),
+
+ # # Launch arguments
+ # DeclareLaunchArgument('object_prefix', default_value='testingggggg', description='TF prefix of objects.'),
+
+ # DeclareLaunchArgument('rgb_topic', default_value='rgb_img', description='Image topic.'),
+ # DeclareLaunchArgument('depth_topic', default_value='depth_img', description='Registered depth topic.'),
+ # DeclareLaunchArgument('camera_info_topic', default_value='camera_info', description='Camera info topic.'),
+ # DeclareLaunchArgument('bounding_box_topic', default_value='bboxes', description='Bouding box topic.'),
+
+ # Nodes to launch
+ Node(
+ package='yolov3_msg', executable='detect_on_bag.py', output='screen',
+ # parameters=[{
+ # 'object_prefix':LaunchConfiguration('object_prefix'),
+ # }],
+ # remappings=[
+ # ('rgb_img', LaunchConfiguration('rgb_topic')),
+ # ('depth_img', LaunchConfiguration('depth_topic')),
+ # ('camera_info', LaunchConfiguration('camera_info_topic'))]
+ ),
+ ])
diff --git a/ros2_ws/src/yolov3/models/__init__.py b/yolov3/models/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/models/__init__.py
rename to yolov3/models/__init__.py
diff --git a/ros2_ws/src/yolov3/models/common.py b/yolov3/models/common.py
similarity index 100%
rename from ros2_ws/src/yolov3/models/common.py
rename to yolov3/models/common.py
diff --git a/ros2_ws/src/yolov3/models/experimental.py b/yolov3/models/experimental.py
similarity index 100%
rename from ros2_ws/src/yolov3/models/experimental.py
rename to yolov3/models/experimental.py
diff --git a/ros2_ws/src/yolov3/models/hub/anchors.yaml b/yolov3/models/hub/anchors.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/anchors.yaml
rename to yolov3/models/hub/anchors.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5-bifpn.yaml b/yolov3/models/hub/yolov5-bifpn.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5-bifpn.yaml
rename to yolov3/models/hub/yolov5-bifpn.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5-fpn.yaml b/yolov3/models/hub/yolov5-fpn.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5-fpn.yaml
rename to yolov3/models/hub/yolov5-fpn.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5-p2.yaml b/yolov3/models/hub/yolov5-p2.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5-p2.yaml
rename to yolov3/models/hub/yolov5-p2.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5-p34.yaml b/yolov3/models/hub/yolov5-p34.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5-p34.yaml
rename to yolov3/models/hub/yolov5-p34.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5-p6.yaml b/yolov3/models/hub/yolov5-p6.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5-p6.yaml
rename to yolov3/models/hub/yolov5-p6.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5-p7.yaml b/yolov3/models/hub/yolov5-p7.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5-p7.yaml
rename to yolov3/models/hub/yolov5-p7.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5-panet.yaml b/yolov3/models/hub/yolov5-panet.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5-panet.yaml
rename to yolov3/models/hub/yolov5-panet.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5l6.yaml b/yolov3/models/hub/yolov5l6.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5l6.yaml
rename to yolov3/models/hub/yolov5l6.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5m6.yaml b/yolov3/models/hub/yolov5m6.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5m6.yaml
rename to yolov3/models/hub/yolov5m6.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5n6.yaml b/yolov3/models/hub/yolov5n6.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5n6.yaml
rename to yolov3/models/hub/yolov5n6.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5s-LeakyReLU.yaml b/yolov3/models/hub/yolov5s-LeakyReLU.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5s-LeakyReLU.yaml
rename to yolov3/models/hub/yolov5s-LeakyReLU.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5s-ghost.yaml b/yolov3/models/hub/yolov5s-ghost.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5s-ghost.yaml
rename to yolov3/models/hub/yolov5s-ghost.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5s-transformer.yaml b/yolov3/models/hub/yolov5s-transformer.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5s-transformer.yaml
rename to yolov3/models/hub/yolov5s-transformer.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5s6.yaml b/yolov3/models/hub/yolov5s6.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5s6.yaml
rename to yolov3/models/hub/yolov5s6.yaml
diff --git a/ros2_ws/src/yolov3/models/hub/yolov5x6.yaml b/yolov3/models/hub/yolov5x6.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/hub/yolov5x6.yaml
rename to yolov3/models/hub/yolov5x6.yaml
diff --git a/ros2_ws/src/yolov3/models/segment/yolov5l-seg.yaml b/yolov3/models/segment/yolov5l-seg.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/segment/yolov5l-seg.yaml
rename to yolov3/models/segment/yolov5l-seg.yaml
diff --git a/ros2_ws/src/yolov3/models/segment/yolov5m-seg.yaml b/yolov3/models/segment/yolov5m-seg.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/segment/yolov5m-seg.yaml
rename to yolov3/models/segment/yolov5m-seg.yaml
diff --git a/ros2_ws/src/yolov3/models/segment/yolov5n-seg.yaml b/yolov3/models/segment/yolov5n-seg.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/segment/yolov5n-seg.yaml
rename to yolov3/models/segment/yolov5n-seg.yaml
diff --git a/ros2_ws/src/yolov3/models/segment/yolov5s-seg.yaml b/yolov3/models/segment/yolov5s-seg.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/segment/yolov5s-seg.yaml
rename to yolov3/models/segment/yolov5s-seg.yaml
diff --git a/ros2_ws/src/yolov3/models/segment/yolov5x-seg.yaml b/yolov3/models/segment/yolov5x-seg.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/segment/yolov5x-seg.yaml
rename to yolov3/models/segment/yolov5x-seg.yaml
diff --git a/ros2_ws/src/yolov3/models/tf.py b/yolov3/models/tf.py
similarity index 100%
rename from ros2_ws/src/yolov3/models/tf.py
rename to yolov3/models/tf.py
diff --git a/ros2_ws/src/yolov3/models/yolo.py b/yolov3/models/yolo.py
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolo.py
rename to yolov3/models/yolo.py
diff --git a/ros2_ws/src/yolov3/models/yolov3-spp.yaml b/yolov3/models/yolov3-spp.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolov3-spp.yaml
rename to yolov3/models/yolov3-spp.yaml
diff --git a/ros2_ws/src/yolov3/models/yolov3-tiny.yaml b/yolov3/models/yolov3-tiny.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolov3-tiny.yaml
rename to yolov3/models/yolov3-tiny.yaml
diff --git a/ros2_ws/src/yolov3/models/yolov3.yaml b/yolov3/models/yolov3.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolov3.yaml
rename to yolov3/models/yolov3.yaml
diff --git a/ros2_ws/src/yolov3/models/yolov5l.yaml b/yolov3/models/yolov5l.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolov5l.yaml
rename to yolov3/models/yolov5l.yaml
diff --git a/ros2_ws/src/yolov3/models/yolov5m.yaml b/yolov3/models/yolov5m.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolov5m.yaml
rename to yolov3/models/yolov5m.yaml
diff --git a/ros2_ws/src/yolov3/models/yolov5n.yaml b/yolov3/models/yolov5n.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolov5n.yaml
rename to yolov3/models/yolov5n.yaml
diff --git a/ros2_ws/src/yolov3/models/yolov5s.yaml b/yolov3/models/yolov5s.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolov5s.yaml
rename to yolov3/models/yolov5s.yaml
diff --git a/ros2_ws/src/yolov3/models/yolov5x.yaml b/yolov3/models/yolov5x.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/models/yolov5x.yaml
rename to yolov3/models/yolov5x.yaml
diff --git a/ros2_ws/src/yolov3/msg/BoundingBox.msg b/yolov3/msg/BoundingBox.msg
similarity index 100%
rename from ros2_ws/src/yolov3/msg/BoundingBox.msg
rename to yolov3/msg/BoundingBox.msg
diff --git a/ros2_ws/src/yolov3/msg/BoundingBoxes.msg b/yolov3/msg/BoundingBoxes.msg
similarity index 100%
rename from ros2_ws/src/yolov3/msg/BoundingBoxes.msg
rename to yolov3/msg/BoundingBoxes.msg
diff --git a/ros2_ws/src/yolov3/package.xml b/yolov3/package.xml
similarity index 100%
rename from ros2_ws/src/yolov3/package.xml
rename to yolov3/package.xml
diff --git a/ros2_ws/src/yolov3/requirements.txt b/yolov3/requirements.txt
similarity index 100%
rename from ros2_ws/src/yolov3/requirements.txt
rename to yolov3/requirements.txt
diff --git a/ros2_ws/src/yolov3/runs-20230212T095309Z-001.zip b/yolov3/runs-20230212T095309Z-001.zip
similarity index 100%
rename from ros2_ws/src/yolov3/runs-20230212T095309Z-001.zip
rename to yolov3/runs-20230212T095309Z-001.zip
diff --git a/ros2_ws/src/yolov3/segment/predict.py b/yolov3/segment/predict.py
similarity index 100%
rename from ros2_ws/src/yolov3/segment/predict.py
rename to yolov3/segment/predict.py
diff --git a/ros2_ws/src/yolov3/segment/train.py b/yolov3/segment/train.py
similarity index 100%
rename from ros2_ws/src/yolov3/segment/train.py
rename to yolov3/segment/train.py
diff --git a/ros2_ws/src/yolov3/segment/tutorial.ipynb b/yolov3/segment/tutorial.ipynb
similarity index 100%
rename from ros2_ws/src/yolov3/segment/tutorial.ipynb
rename to yolov3/segment/tutorial.ipynb
diff --git a/ros2_ws/src/yolov3/segment/val.py b/yolov3/segment/val.py
similarity index 100%
rename from ros2_ws/src/yolov3/segment/val.py
rename to yolov3/segment/val.py
diff --git a/ros2_ws/src/yolov3/setup.cfg b/yolov3/setup.cfg
similarity index 100%
rename from ros2_ws/src/yolov3/setup.cfg
rename to yolov3/setup.cfg
diff --git a/yolov3/setup.py b/yolov3/setup.py
new file mode 100644
index 00000000..a1bdf9dd
--- /dev/null
+++ b/yolov3/setup.py
@@ -0,0 +1,26 @@
+from setuptools import setup
+
+package_name = 'yolov3_msg'
+
+setup(
+ name=package_name,
+ version='0.0.0',
+ packages=[package_name],
+ data_files=[
+ ('share/ament_index/resource_index/packages',
+ ['resource/' + package_name]),
+ ('share/' + package_name, ['package.xml']),
+ ],
+ install_requires=['setuptools'],
+ zip_safe=True,
+ maintainer='parallels',
+ maintainer_email='eic.apoorva@gmail.com',
+ description='TODO: Package description',
+ license='TODO: License declaration',
+ tests_require=['pytest'],
+ entry_points={
+ 'console_scripts': [
+ 'yolov3_msg = yolov3_msg.detect_on_bag:main',
+ ],
+ },
+)
\ No newline at end of file
diff --git a/ros2_ws/src/yolov3/train.py b/yolov3/train.py
similarity index 100%
rename from ros2_ws/src/yolov3/train.py
rename to yolov3/train.py
diff --git a/ros2_ws/src/yolov3/tutorial.ipynb b/yolov3/tutorial.ipynb
similarity index 100%
rename from ros2_ws/src/yolov3/tutorial.ipynb
rename to yolov3/tutorial.ipynb
diff --git a/ros2_ws/src/yolov3/utils/__init__.py b/yolov3/utils/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/__init__.py
rename to yolov3/utils/__init__.py
diff --git a/ros2_ws/src/yolov3/utils/activations.py b/yolov3/utils/activations.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/activations.py
rename to yolov3/utils/activations.py
diff --git a/ros2_ws/src/yolov3/utils/augmentations.py b/yolov3/utils/augmentations.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/augmentations.py
rename to yolov3/utils/augmentations.py
diff --git a/ros2_ws/src/yolov3/utils/autoanchor.py b/yolov3/utils/autoanchor.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/autoanchor.py
rename to yolov3/utils/autoanchor.py
diff --git a/ros2_ws/src/yolov3/utils/autobatch.py b/yolov3/utils/autobatch.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/autobatch.py
rename to yolov3/utils/autobatch.py
diff --git a/ros2_ws/src/yolov3/utils/aws/__init__.py b/yolov3/utils/aws/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/aws/__init__.py
rename to yolov3/utils/aws/__init__.py
diff --git a/ros2_ws/src/yolov3/utils/aws/mime.sh b/yolov3/utils/aws/mime.sh
similarity index 100%
rename from ros2_ws/src/yolov3/utils/aws/mime.sh
rename to yolov3/utils/aws/mime.sh
diff --git a/ros2_ws/src/yolov3/utils/aws/resume.py b/yolov3/utils/aws/resume.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/aws/resume.py
rename to yolov3/utils/aws/resume.py
diff --git a/ros2_ws/src/yolov3/utils/aws/userdata.sh b/yolov3/utils/aws/userdata.sh
similarity index 100%
rename from ros2_ws/src/yolov3/utils/aws/userdata.sh
rename to yolov3/utils/aws/userdata.sh
diff --git a/ros2_ws/src/yolov3/utils/callbacks.py b/yolov3/utils/callbacks.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/callbacks.py
rename to yolov3/utils/callbacks.py
diff --git a/ros2_ws/src/yolov3/utils/dataloaders.py b/yolov3/utils/dataloaders.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/dataloaders.py
rename to yolov3/utils/dataloaders.py
diff --git a/yolov3/utils/datasets.py b/yolov3/utils/datasets.py
new file mode 100755
index 00000000..462d561a
--- /dev/null
+++ b/yolov3/utils/datasets.py
@@ -0,0 +1,1036 @@
+# YOLOv3 🚀 by Ultralytics, GPL-3.0 license
+"""
+Dataloaders and dataset utils
+"""
+
+import glob
+import hashlib
+import json
+import os
+import random
+import shutil
+import time
+from itertools import repeat
+from multiprocessing.pool import Pool, ThreadPool
+from pathlib import Path
+from threading import Thread
+from zipfile import ZipFile
+
+import cv2
+import numpy as np
+import torch
+import torch.nn.functional as F
+import yaml
+from PIL import ExifTags, Image, ImageOps
+from torch.utils.data import DataLoader, Dataset, dataloader, distributed
+from tqdm import tqdm
+
+from utils.augmentations import Albumentations, augment_hsv, copy_paste, letterbox, mixup, random_perspective
+from utils.general import (LOGGER, check_dataset, check_requirements, check_yaml, clean_str, segments2boxes, xyn2xy,
+ xywh2xyxy, xywhn2xyxy, xyxy2xywhn)
+from utils.torch_utils import torch_distributed_zero_first
+
+# Parameters
+HELP_URL = 'https://github.com/ultralytics/yolov3/wiki/Train-Custom-Data'
+IMG_FORMATS = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo'] # acceptable image suffixes
+VID_FORMATS = ['mov', 'avi', 'mp4', 'mpg', 'mpeg', 'm4v', 'wmv', 'mkv'] # acceptable video suffixes
+WORLD_SIZE = int(os.getenv('WORLD_SIZE', 1)) # DPP
+NUM_THREADS = min(8, os.cpu_count()) # number of multiprocessing threads
+
+# Get orientation exif tag
+for orientation in ExifTags.TAGS.keys():
+ if ExifTags.TAGS[orientation] == 'Orientation':
+ break
+
+
+def get_hash(paths):
+ # Returns a single hash value of a list of paths (files or dirs)
+ size = sum(os.path.getsize(p) for p in paths if os.path.exists(p)) # sizes
+ h = hashlib.md5(str(size).encode()) # hash sizes
+ h.update(''.join(paths).encode()) # hash paths
+ return h.hexdigest() # return hash
+
+
+def exif_size(img):
+ # Returns exif-corrected PIL size
+ s = img.size # (width, height)
+ try:
+ rotation = dict(img._getexif().items())[orientation]
+ if rotation == 6: # rotation 270
+ s = (s[1], s[0])
+ elif rotation == 8: # rotation 90
+ s = (s[1], s[0])
+ except:
+ pass
+
+ return s
+
+
+def exif_transpose(image):
+ """
+ Transpose a PIL image accordingly if it has an EXIF Orientation tag.
+ Inplace version of https://github.com/python-pillow/Pillow/blob/master/src/PIL/ImageOps.py exif_transpose()
+
+ :param image: The image to transpose.
+ :return: An image.
+ """
+ exif = image.getexif()
+ orientation = exif.get(0x0112, 1) # default 1
+ if orientation > 1:
+ method = {2: Image.FLIP_LEFT_RIGHT,
+ 3: Image.ROTATE_180,
+ 4: Image.FLIP_TOP_BOTTOM,
+ 5: Image.TRANSPOSE,
+ 6: Image.ROTATE_270,
+ 7: Image.TRANSVERSE,
+ 8: Image.ROTATE_90,
+ }.get(orientation)
+ if method is not None:
+ image = image.transpose(method)
+ del exif[0x0112]
+ image.info["exif"] = exif.tobytes()
+ return image
+
+
+def create_dataloader(path, imgsz, batch_size, stride, single_cls=False, hyp=None, augment=False, cache=False, pad=0.0,
+ rect=False, rank=-1, workers=8, image_weights=False, quad=False, prefix='', shuffle=False):
+ if rect and shuffle:
+ LOGGER.warning('WARNING: --rect is incompatible with DataLoader shuffle, setting shuffle=False')
+ shuffle = False
+ with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
+ dataset = LoadImagesAndLabels(path, imgsz, batch_size,
+ augment=augment, # augmentation
+ hyp=hyp, # hyperparameters
+ rect=rect, # rectangular batches
+ cache_images=cache,
+ single_cls=single_cls,
+ stride=int(stride),
+ pad=pad,
+ image_weights=image_weights,
+ prefix=prefix)
+
+ batch_size = min(batch_size, len(dataset))
+ nw = min([os.cpu_count() // WORLD_SIZE, batch_size if batch_size > 1 else 0, workers]) # number of workers
+ sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
+ loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
+ return loader(dataset,
+ batch_size=batch_size,
+ shuffle=shuffle and sampler is None,
+ num_workers=nw,
+ sampler=sampler,
+ pin_memory=True,
+ collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn), dataset
+
+
+class InfiniteDataLoader(dataloader.DataLoader):
+ """ Dataloader that reuses workers
+
+ Uses same syntax as vanilla DataLoader
+ """
+
+ def __init__(self, *args, **kwargs):
+ super().__init__(*args, **kwargs)
+ object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
+ self.iterator = super().__iter__()
+
+ def __len__(self):
+ return len(self.batch_sampler.sampler)
+
+ def __iter__(self):
+ for i in range(len(self)):
+ yield next(self.iterator)
+
+
+class _RepeatSampler:
+ """ Sampler that repeats forever
+
+ Args:
+ sampler (Sampler)
+ """
+
+ def __init__(self, sampler):
+ self.sampler = sampler
+
+ def __iter__(self):
+ while True:
+ yield from iter(self.sampler)
+
+
+class LoadImages:
+ # image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`
+ def __init__(self, path, img_size=640, stride=32, auto=True):
+ p = str(Path(path).resolve()) # os-agnostic absolute path
+ if '*' in p:
+ files = sorted(glob.glob(p, recursive=True)) # glob
+ elif os.path.isdir(p):
+ files = sorted(glob.glob(os.path.join(p, '*.*'))) # dir
+ elif os.path.isfile(p):
+ files = [p] # files
+ else:
+ raise Exception(f'ERROR: {p} does not exist')
+
+ images = [x for x in files if x.split('.')[-1].lower() in IMG_FORMATS]
+ videos = [x for x in files if x.split('.')[-1].lower() in VID_FORMATS]
+ ni, nv = len(images), len(videos)
+
+ self.img_size = img_size
+ self.stride = stride
+ self.files = images + videos
+ self.nf = ni + nv # number of files
+ self.video_flag = [False] * ni + [True] * nv
+ self.mode = 'image'
+ self.auto = auto
+ if any(videos):
+ self.new_video(videos[0]) # new video
+ else:
+ self.cap = None
+ assert self.nf > 0, f'No images or videos found in {p}. ' \
+ f'Supported formats are:\nimages: {IMG_FORMATS}\nvideos: {VID_FORMATS}'
+
+ def __iter__(self):
+ self.count = 0
+ return self
+
+ def __next__(self):
+ if self.count == self.nf:
+ raise StopIteration
+ path = self.files[self.count]
+
+ if self.video_flag[self.count]:
+ # Read video
+ self.mode = 'video'
+ ret_val, img0 = self.cap.read()
+ if not ret_val:
+ self.count += 1
+ self.cap.release()
+ if self.count == self.nf: # last video
+ raise StopIteration
+ else:
+ path = self.files[self.count]
+ self.new_video(path)
+ ret_val, img0 = self.cap.read()
+
+ self.frame += 1
+ s = f'video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: '
+
+ else:
+ # Read image
+ self.count += 1
+ img0 = cv2.imread(path) # BGR
+ assert img0 is not None, f'Image Not Found {path}'
+ s = f'image {self.count}/{self.nf} {path}: '
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride, auto=self.auto)[0]
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return path, img, img0, self.cap, s
+
+ def new_video(self, path):
+ self.frame = 0
+ self.cap = cv2.VideoCapture(path)
+ self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
+
+ def __len__(self):
+ return self.nf # number of files
+
+
+class LoadWebcam: # for inference
+ # local webcam dataloader, i.e. `python detect.py --source 0`
+ def __init__(self, pipe='0', img_size=640, stride=32):
+ self.img_size = img_size
+ self.stride = stride
+ self.pipe = eval(pipe) if pipe.isnumeric() else pipe
+ self.cap = cv2.VideoCapture(self.pipe) # video capture object
+ self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if cv2.waitKey(1) == ord('q'): # q to quit
+ self.cap.release()
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Read frame
+ ret_val, img0 = self.cap.read()
+ img0 = cv2.flip(img0, 1) # flip left-right
+
+ # Print
+ assert ret_val, f'Camera Error {self.pipe}'
+ img_path = 'webcam.jpg'
+ s = f'webcam {self.count}: '
+
+ # Padded resize
+ img = letterbox(img0, self.img_size, stride=self.stride)[0]
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return img_path, img, img0, None, s
+
+ def __len__(self):
+ return 0
+
+
+class LoadStreams:
+ # streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
+ def __init__(self, sources='streams.txt', img_size=640, stride=32, auto=True):
+ self.mode = 'stream'
+ self.img_size = img_size
+ self.stride = stride
+
+ if os.path.isfile(sources):
+ with open(sources) as f:
+ sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
+ else:
+ sources = [sources]
+
+ n = len(sources)
+ self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
+ self.sources = [clean_str(x) for x in sources] # clean source names for later
+ self.auto = auto
+ for i, s in enumerate(sources): # index, source
+ # Start thread to read frames from video stream
+ st = f'{i + 1}/{n}: {s}... '
+ if 'youtube.com/' in s or 'youtu.be/' in s: # if source is YouTube video
+ check_requirements(('pafy', 'youtube_dl'))
+ import pafy
+ s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
+ s = eval(s) if s.isnumeric() else s # i.e. s = '0' local webcam
+ cap = cv2.VideoCapture(s)
+ assert cap.isOpened(), f'{st}Failed to open {s}'
+ w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
+ h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
+ self.fps[i] = max(cap.get(cv2.CAP_PROP_FPS) % 100, 0) or 30.0 # 30 FPS fallback
+ self.frames[i] = max(int(cap.get(cv2.CAP_PROP_FRAME_COUNT)), 0) or float('inf') # infinite stream fallback
+
+ _, self.imgs[i] = cap.read() # guarantee first frame
+ self.threads[i] = Thread(target=self.update, args=([i, cap, s]), daemon=True)
+ LOGGER.info(f"{st} Success ({self.frames[i]} frames {w}x{h} at {self.fps[i]:.2f} FPS)")
+ self.threads[i].start()
+ LOGGER.info('') # newline
+
+ # check for common shapes
+ s = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0].shape for x in self.imgs])
+ self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
+ if not self.rect:
+ LOGGER.warning('WARNING: Stream shapes differ. For optimal performance supply similarly-shaped streams.')
+
+ def update(self, i, cap, stream):
+ # Read stream `i` frames in daemon thread
+ n, f, read = 0, self.frames[i], 1 # frame number, frame array, inference every 'read' frame
+ while cap.isOpened() and n < f:
+ n += 1
+ # _, self.imgs[index] = cap.read()
+ cap.grab()
+ if n % read == 0:
+ success, im = cap.retrieve()
+ if success:
+ self.imgs[i] = im
+ else:
+ LOGGER.warning('WARNING: Video stream unresponsive, please check your IP camera connection.')
+ self.imgs[i] *= 0
+ cap.open(stream) # re-open stream if signal was lost
+ time.sleep(1 / self.fps[i]) # wait time
+
+ def __iter__(self):
+ self.count = -1
+ return self
+
+ def __next__(self):
+ self.count += 1
+ if not all(x.is_alive() for x in self.threads) or cv2.waitKey(1) == ord('q'): # q to quit
+ cv2.destroyAllWindows()
+ raise StopIteration
+
+ # Letterbox
+ img0 = self.imgs.copy()
+ img = [letterbox(x, self.img_size, stride=self.stride, auto=self.rect and self.auto)[0] for x in img0]
+
+ # Stack
+ img = np.stack(img, 0)
+
+ # Convert
+ img = img[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
+ img = np.ascontiguousarray(img)
+
+ return self.sources, img, img0, None, ''
+
+ def __len__(self):
+ return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
+
+
+def img2label_paths(img_paths):
+ # Define label paths as a function of image paths
+ sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
+ return [sb.join(x.rsplit(sa, 1)).rsplit('.', 1)[0] + '.txt' for x in img_paths]
+
+
+class LoadImagesAndLabels(Dataset):
+ # train_loader/val_loader, loads images and labels for training and validation
+ cache_version = 0.6 # dataset labels *.cache version
+
+ def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
+ cache_images=False, single_cls=False, stride=32, pad=0.0, prefix=''):
+ self.img_size = img_size
+ self.augment = augment
+ self.hyp = hyp
+ self.image_weights = image_weights
+ self.rect = False if image_weights else rect
+ self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
+ self.mosaic_border = [-img_size // 2, -img_size // 2]
+ self.stride = stride
+ self.path = path
+ self.albumentations = Albumentations() if augment else None
+
+ try:
+ f = [] # image files
+ for p in path if isinstance(path, list) else [path]:
+ p = Path(p) # os-agnostic
+ if p.is_dir(): # dir
+ f += glob.glob(str(p / '**' / '*.*'), recursive=True)
+ # f = list(p.rglob('*.*')) # pathlib
+ elif p.is_file(): # file
+ with open(p) as t:
+ t = t.read().strip().splitlines()
+ parent = str(p.parent) + os.sep
+ f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
+ # f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
+ else:
+ raise Exception(f'{prefix}{p} does not exist')
+ self.img_files = sorted(x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in IMG_FORMATS)
+ # self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
+ assert self.img_files, f'{prefix}No images found'
+ except Exception as e:
+ raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {HELP_URL}')
+
+ # Check cache
+ self.label_files = img2label_paths(self.img_files) # labels
+ cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache')
+ try:
+ cache, exists = np.load(cache_path, allow_pickle=True).item(), True # load dict
+ assert cache['version'] == self.cache_version # same version
+ assert cache['hash'] == get_hash(self.label_files + self.img_files) # same hash
+ except:
+ cache, exists = self.cache_labels(cache_path, prefix), False # cache
+
+ # Display cache
+ nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupted, total
+ if exists:
+ d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+ tqdm(None, desc=prefix + d, total=n, initial=n) # display cache results
+ if cache['msgs']:
+ LOGGER.info('\n'.join(cache['msgs'])) # display warnings
+ assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {HELP_URL}'
+
+ # Read cache
+ [cache.pop(k) for k in ('hash', 'version', 'msgs')] # remove items
+ labels, shapes, self.segments = zip(*cache.values())
+ self.labels = list(labels)
+ self.shapes = np.array(shapes, dtype=np.float64)
+ self.img_files = list(cache.keys()) # update
+ self.label_files = img2label_paths(cache.keys()) # update
+ n = len(shapes) # number of images
+ bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
+ nb = bi[-1] + 1 # number of batches
+ self.batch = bi # batch index of image
+ self.n = n
+ self.indices = range(n)
+
+ # Update labels
+ include_class = [] # filter labels to include only these classes (optional)
+ include_class_array = np.array(include_class).reshape(1, -1)
+ for i, (label, segment) in enumerate(zip(self.labels, self.segments)):
+ if include_class:
+ j = (label[:, 0:1] == include_class_array).any(1)
+ self.labels[i] = label[j]
+ if segment:
+ self.segments[i] = segment[j]
+ if single_cls: # single-class training, merge all classes into 0
+ self.labels[i][:, 0] = 0
+ if segment:
+ self.segments[i][:, 0] = 0
+
+ # Rectangular Training
+ if self.rect:
+ # Sort by aspect ratio
+ s = self.shapes # wh
+ ar = s[:, 1] / s[:, 0] # aspect ratio
+ irect = ar.argsort()
+ self.img_files = [self.img_files[i] for i in irect]
+ self.label_files = [self.label_files[i] for i in irect]
+ self.labels = [self.labels[i] for i in irect]
+ self.shapes = s[irect] # wh
+ ar = ar[irect]
+
+ # Set training image shapes
+ shapes = [[1, 1]] * nb
+ for i in range(nb):
+ ari = ar[bi == i]
+ mini, maxi = ari.min(), ari.max()
+ if maxi < 1:
+ shapes[i] = [maxi, 1]
+ elif mini > 1:
+ shapes[i] = [1, 1 / mini]
+
+ self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
+
+ # Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
+ self.imgs, self.img_npy = [None] * n, [None] * n
+ if cache_images:
+ if cache_images == 'disk':
+ self.im_cache_dir = Path(Path(self.img_files[0]).parent.as_posix() + '_npy')
+ self.img_npy = [self.im_cache_dir / Path(f).with_suffix('.npy').name for f in self.img_files]
+ self.im_cache_dir.mkdir(parents=True, exist_ok=True)
+ gb = 0 # Gigabytes of cached images
+ self.img_hw0, self.img_hw = [None] * n, [None] * n
+ results = ThreadPool(NUM_THREADS).imap(lambda x: load_image(*x), zip(repeat(self), range(n)))
+ pbar = tqdm(enumerate(results), total=n)
+ for i, x in pbar:
+ if cache_images == 'disk':
+ if not self.img_npy[i].exists():
+ np.save(self.img_npy[i].as_posix(), x[0])
+ gb += self.img_npy[i].stat().st_size
+ else:
+ self.imgs[i], self.img_hw0[i], self.img_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
+ gb += self.imgs[i].nbytes
+ pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB {cache_images})'
+ pbar.close()
+
+ def cache_labels(self, path=Path('./labels.cache'), prefix=''):
+ # Cache dataset labels, check images and read shapes
+ x = {} # dict
+ nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
+ desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels..."
+ with Pool(NUM_THREADS) as pool:
+ pbar = tqdm(pool.imap(verify_image_label, zip(self.img_files, self.label_files, repeat(prefix))),
+ desc=desc, total=len(self.img_files))
+ for im_file, l, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
+ nm += nm_f
+ nf += nf_f
+ ne += ne_f
+ nc += nc_f
+ if im_file:
+ x[im_file] = [l, shape, segments]
+ if msg:
+ msgs.append(msg)
+ pbar.desc = f"{desc}{nf} found, {nm} missing, {ne} empty, {nc} corrupted"
+
+ pbar.close()
+ if msgs:
+ LOGGER.info('\n'.join(msgs))
+ if nf == 0:
+ LOGGER.warning(f'{prefix}WARNING: No labels found in {path}. See {HELP_URL}')
+ x['hash'] = get_hash(self.label_files + self.img_files)
+ x['results'] = nf, nm, ne, nc, len(self.img_files)
+ x['msgs'] = msgs # warnings
+ x['version'] = self.cache_version # cache version
+ try:
+ np.save(path, x) # save cache for next time
+ path.with_suffix('.cache.npy').rename(path) # remove .npy suffix
+ LOGGER.info(f'{prefix}New cache created: {path}')
+ except Exception as e:
+ LOGGER.warning(f'{prefix}WARNING: Cache directory {path.parent} is not writeable: {e}') # not writeable
+ return x
+
+ def __len__(self):
+ return len(self.img_files)
+
+ # def __iter__(self):
+ # self.count = -1
+ # print('ran dataset iter')
+ # #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
+ # return self
+
+ def __getitem__(self, index):
+ index = self.indices[index] # linear, shuffled, or image_weights
+
+ hyp = self.hyp
+ mosaic = self.mosaic and random.random() < hyp['mosaic']
+ if mosaic:
+ # Load mosaic
+ img, labels = load_mosaic(self, index)
+ shapes = None
+
+ # MixUp augmentation
+ if random.random() < hyp['mixup']:
+ img, labels = mixup(img, labels, *load_mosaic(self, random.randint(0, self.n - 1)))
+
+ else:
+ # Load image
+ img, (h0, w0), (h, w) = load_image(self, index)
+
+ # Letterbox
+ shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
+ img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
+ shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
+
+ labels = self.labels[index].copy()
+ if labels.size: # normalized xywh to pixel xyxy format
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
+
+ if self.augment:
+ img, labels = random_perspective(img, labels,
+ degrees=hyp['degrees'],
+ translate=hyp['translate'],
+ scale=hyp['scale'],
+ shear=hyp['shear'],
+ perspective=hyp['perspective'])
+
+ nl = len(labels) # number of labels
+ if nl:
+ labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1E-3)
+
+ if self.augment:
+ # Albumentations
+ img, labels = self.albumentations(img, labels)
+ nl = len(labels) # update after albumentations
+
+ # HSV color-space
+ augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
+
+ # Flip up-down
+ if random.random() < hyp['flipud']:
+ img = np.flipud(img)
+ if nl:
+ labels[:, 2] = 1 - labels[:, 2]
+
+ # Flip left-right
+ if random.random() < hyp['fliplr']:
+ img = np.fliplr(img)
+ if nl:
+ labels[:, 1] = 1 - labels[:, 1]
+
+ # Cutouts
+ # labels = cutout(img, labels, p=0.5)
+
+ labels_out = torch.zeros((nl, 6))
+ if nl:
+ labels_out[:, 1:] = torch.from_numpy(labels)
+
+ # Convert
+ img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
+ img = np.ascontiguousarray(img)
+
+ return torch.from_numpy(img), labels_out, self.img_files[index], shapes
+
+ @staticmethod
+ def collate_fn(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ for i, l in enumerate(label):
+ l[:, 0] = i # add target image index for build_targets()
+ return torch.stack(img, 0), torch.cat(label, 0), path, shapes
+
+ @staticmethod
+ def collate_fn4(batch):
+ img, label, path, shapes = zip(*batch) # transposed
+ n = len(shapes) // 4
+ img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
+
+ ho = torch.tensor([[0.0, 0, 0, 1, 0, 0]])
+ wo = torch.tensor([[0.0, 0, 1, 0, 0, 0]])
+ s = torch.tensor([[1, 1, 0.5, 0.5, 0.5, 0.5]]) # scale
+ for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
+ i *= 4
+ if random.random() < 0.5:
+ im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2.0, mode='bilinear', align_corners=False)[
+ 0].type(img[i].type())
+ l = label[i]
+ else:
+ im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
+ l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
+ img4.append(im)
+ label4.append(l)
+
+ for i, l in enumerate(label4):
+ l[:, 0] = i # add target image index for build_targets()
+
+ return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
+
+
+# Ancillary functions --------------------------------------------------------------------------------------------------
+def load_image(self, i):
+ # loads 1 image from dataset index 'i', returns im, original hw, resized hw
+ im = self.imgs[i]
+ if im is None: # not cached in ram
+ npy = self.img_npy[i]
+ if npy and npy.exists(): # load npy
+ im = np.load(npy)
+ else: # read image
+ path = self.img_files[i]
+ im = cv2.imread(path) # BGR
+ assert im is not None, f'Image Not Found {path}'
+ h0, w0 = im.shape[:2] # orig hw
+ r = self.img_size / max(h0, w0) # ratio
+ if r != 1: # if sizes are not equal
+ im = cv2.resize(im, (int(w0 * r), int(h0 * r)),
+ interpolation=cv2.INTER_AREA if r < 1 and not self.augment else cv2.INTER_LINEAR)
+ return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
+ else:
+ return self.imgs[i], self.img_hw0[i], self.img_hw[i] # im, hw_original, hw_resized
+
+
+def load_mosaic(self, index):
+ # 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
+ labels4, segments4 = [], []
+ s = self.img_size
+ yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
+ indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
+ random.shuffle(indices)
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img4
+ if i == 0: # top left
+ img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
+ elif i == 1: # top right
+ x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
+ x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
+ elif i == 2: # bottom left
+ x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
+ elif i == 3: # bottom right
+ x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
+ x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
+
+ img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
+ padw = x1a - x1b
+ padh = y1a - y1b
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
+ labels4.append(labels)
+ segments4.extend(segments)
+
+ # Concat/clip labels
+ labels4 = np.concatenate(labels4, 0)
+ for x in (labels4[:, 1:], *segments4):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img4, labels4 = replicate(img4, labels4) # replicate
+
+ # Augment
+ img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp['copy_paste'])
+ img4, labels4 = random_perspective(img4, labels4, segments4,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img4, labels4
+
+
+def load_mosaic9(self, index):
+ # 9-mosaic loader. Loads 1 image + 8 random images into a 9-image mosaic
+ labels9, segments9 = [], []
+ s = self.img_size
+ indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
+ random.shuffle(indices)
+ for i, index in enumerate(indices):
+ # Load image
+ img, _, (h, w) = load_image(self, index)
+
+ # place img in img9
+ if i == 0: # center
+ img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
+ h0, w0 = h, w
+ c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
+ elif i == 1: # top
+ c = s, s - h, s + w, s
+ elif i == 2: # top right
+ c = s + wp, s - h, s + wp + w, s
+ elif i == 3: # right
+ c = s + w0, s, s + w0 + w, s + h
+ elif i == 4: # bottom right
+ c = s + w0, s + hp, s + w0 + w, s + hp + h
+ elif i == 5: # bottom
+ c = s + w0 - w, s + h0, s + w0, s + h0 + h
+ elif i == 6: # bottom left
+ c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
+ elif i == 7: # left
+ c = s - w, s + h0 - h, s, s + h0
+ elif i == 8: # top left
+ c = s - w, s + h0 - hp - h, s, s + h0 - hp
+
+ padx, pady = c[:2]
+ x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords
+
+ # Labels
+ labels, segments = self.labels[index].copy(), self.segments[index].copy()
+ if labels.size:
+ labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
+ segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
+ labels9.append(labels)
+ segments9.extend(segments)
+
+ # Image
+ img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
+ hp, wp = h, w # height, width previous
+
+ # Offset
+ yc, xc = (int(random.uniform(0, s)) for _ in self.mosaic_border) # mosaic center x, y
+ img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
+
+ # Concat/clip labels
+ labels9 = np.concatenate(labels9, 0)
+ labels9[:, [1, 3]] -= xc
+ labels9[:, [2, 4]] -= yc
+ c = np.array([xc, yc]) # centers
+ segments9 = [x - c for x in segments9]
+
+ for x in (labels9[:, 1:], *segments9):
+ np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
+ # img9, labels9 = replicate(img9, labels9) # replicate
+
+ # Augment
+ img9, labels9 = random_perspective(img9, labels9, segments9,
+ degrees=self.hyp['degrees'],
+ translate=self.hyp['translate'],
+ scale=self.hyp['scale'],
+ shear=self.hyp['shear'],
+ perspective=self.hyp['perspective'],
+ border=self.mosaic_border) # border to remove
+
+ return img9, labels9
+
+
+def create_folder(path='./new'):
+ # Create folder
+ if os.path.exists(path):
+ shutil.rmtree(path) # delete output folder
+ os.makedirs(path) # make new output folder
+
+
+def flatten_recursive(path='../datasets/coco128'):
+ # Flatten a recursive directory by bringing all files to top level
+ new_path = Path(path + '_flat')
+ create_folder(new_path)
+ for file in tqdm(glob.glob(str(Path(path)) + '/**/*.*', recursive=True)):
+ shutil.copyfile(file, new_path / Path(file).name)
+
+
+def extract_boxes(path='../datasets/coco128'): # from utils.datasets import *; extract_boxes()
+ # Convert detection dataset into classification dataset, with one directory per class
+ path = Path(path) # images dir
+ shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
+ files = list(path.rglob('*.*'))
+ n = len(files) # number of files
+ for im_file in tqdm(files, total=n):
+ if im_file.suffix[1:] in IMG_FORMATS:
+ # image
+ im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
+ h, w = im.shape[:2]
+
+ # labels
+ lb_file = Path(img2label_paths([str(im_file)])[0])
+ if Path(lb_file).exists():
+ with open(lb_file) as f:
+ lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
+
+ for j, x in enumerate(lb):
+ c = int(x[0]) # class
+ f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
+ if not f.parent.is_dir():
+ f.parent.mkdir(parents=True)
+
+ b = x[1:] * [w, h, w, h] # box
+ # b[2:] = b[2:].max() # rectangle to square
+ b[2:] = b[2:] * 1.2 + 3 # pad
+ b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
+
+ b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
+ b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
+ assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
+
+
+def autosplit(path='../datasets/coco128/images', weights=(0.9, 0.1, 0.0), annotated_only=False):
+ """ Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
+ Usage: from utils.datasets import *; autosplit()
+ Arguments
+ path: Path to images directory
+ weights: Train, val, test weights (list, tuple)
+ annotated_only: Only use images with an annotated txt file
+ """
+ path = Path(path) # images dir
+ files = sorted(x for x in path.rglob('*.*') if x.suffix[1:].lower() in IMG_FORMATS) # image files only
+ n = len(files) # number of files
+ random.seed(0) # for reproducibility
+ indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
+
+ txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
+ [(path.parent / x).unlink(missing_ok=True) for x in txt] # remove existing
+
+ print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
+ for i, img in tqdm(zip(indices, files), total=n):
+ if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
+ with open(path.parent / txt[i], 'a') as f:
+ f.write('./' + img.relative_to(path.parent).as_posix() + '\n') # add image to txt file
+
+
+def verify_image_label(args):
+ # Verify one image-label pair
+ im_file, lb_file, prefix = args
+ nm, nf, ne, nc, msg, segments = 0, 0, 0, 0, '', [] # number (missing, found, empty, corrupt), message, segments
+ try:
+ # verify images
+ im = Image.open(im_file)
+ im.verify() # PIL verify
+ shape = exif_size(im) # image size
+ assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
+ assert im.format.lower() in IMG_FORMATS, f'invalid image format {im.format}'
+ if im.format.lower() in ('jpg', 'jpeg'):
+ with open(im_file, 'rb') as f:
+ f.seek(-2, 2)
+ if f.read() != b'\xff\xd9': # corrupt JPEG
+ ImageOps.exif_transpose(Image.open(im_file)).save(im_file, 'JPEG', subsampling=0, quality=100)
+ msg = f'{prefix}WARNING: {im_file}: corrupt JPEG restored and saved'
+
+ # verify labels
+ if os.path.isfile(lb_file):
+ nf = 1 # label found
+ with open(lb_file) as f:
+ l = [x.split() for x in f.read().strip().splitlines() if len(x)]
+ if any([len(x) > 8 for x in l]): # is segment
+ classes = np.array([x[0] for x in l], dtype=np.float32)
+ segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in l] # (cls, xy1...)
+ l = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
+ l = np.array(l, dtype=np.float32)
+ nl = len(l)
+ if nl:
+ assert l.shape[1] == 5, f'labels require 5 columns, {l.shape[1]} columns detected'
+ assert (l >= 0).all(), f'negative label values {l[l < 0]}'
+ assert (l[:, 1:] <= 1).all(), f'non-normalized or out of bounds coordinates {l[:, 1:][l[:, 1:] > 1]}'
+ _, i = np.unique(l, axis=0, return_index=True)
+ if len(i) < nl: # duplicate row check
+ l = l[i] # remove duplicates
+ if segments:
+ segments = segments[i]
+ msg = f'{prefix}WARNING: {im_file}: {nl - len(i)} duplicate labels removed'
+ else:
+ ne = 1 # label empty
+ l = np.zeros((0, 5), dtype=np.float32)
+ else:
+ nm = 1 # label missing
+ l = np.zeros((0, 5), dtype=np.float32)
+ return im_file, l, shape, segments, nm, nf, ne, nc, msg
+ except Exception as e:
+ nc = 1
+ msg = f'{prefix}WARNING: {im_file}: ignoring corrupt image/label: {e}'
+ return [None, None, None, None, nm, nf, ne, nc, msg]
+
+
+def dataset_stats(path='coco128.yaml', autodownload=False, verbose=False, profile=False, hub=False):
+ """ Return dataset statistics dictionary with images and instances counts per split per class
+ To run in parent directory: export PYTHONPATH="$PWD/yolov3"
+ Usage1: from utils.datasets import *; dataset_stats('coco128.yaml', autodownload=True)
+ Usage2: from utils.datasets import *; dataset_stats('../datasets/coco128_with_yaml.zip')
+ Arguments
+ path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
+ autodownload: Attempt to download dataset if not found locally
+ verbose: Print stats dictionary
+ """
+
+ def round_labels(labels):
+ # Update labels to integer class and 6 decimal place floats
+ return [[int(c), *(round(x, 4) for x in points)] for c, *points in labels]
+
+ def unzip(path):
+ # Unzip data.zip TODO: CONSTRAINT: path/to/abc.zip MUST unzip to 'path/to/abc/'
+ if str(path).endswith('.zip'): # path is data.zip
+ assert Path(path).is_file(), f'Error unzipping {path}, file not found'
+ ZipFile(path).extractall(path=path.parent) # unzip
+ dir = path.with_suffix('') # dataset directory == zip name
+ return True, str(dir), next(dir.rglob('*.yaml')) # zipped, data_dir, yaml_path
+ else: # path is data.yaml
+ return False, None, path
+
+ def hub_ops(f, max_dim=1920):
+ # HUB ops for 1 image 'f': resize and save at reduced quality in /dataset-hub for web/app viewing
+ f_new = im_dir / Path(f).name # dataset-hub image filename
+ try: # use PIL
+ im = Image.open(f)
+ r = max_dim / max(im.height, im.width) # ratio
+ if r < 1.0: # image too large
+ im = im.resize((int(im.width * r), int(im.height * r)))
+ im.save(f_new, 'JPEG', quality=75, optimize=True) # save
+ except Exception as e: # use OpenCV
+ print(f'WARNING: HUB ops PIL failure {f}: {e}')
+ im = cv2.imread(f)
+ im_height, im_width = im.shape[:2]
+ r = max_dim / max(im_height, im_width) # ratio
+ if r < 1.0: # image too large
+ im = cv2.resize(im, (int(im_width * r), int(im_height * r)), interpolation=cv2.INTER_LINEAR)
+ cv2.imwrite(str(f_new), im)
+
+ zipped, data_dir, yaml_path = unzip(Path(path))
+ with open(check_yaml(yaml_path), errors='ignore') as f:
+ data = yaml.safe_load(f) # data dict
+ if zipped:
+ data['path'] = data_dir # TODO: should this be dir.resolve()?
+ check_dataset(data, autodownload) # download dataset if missing
+ hub_dir = Path(data['path'] + ('-hub' if hub else ''))
+ stats = {'nc': data['nc'], 'names': data['names']} # statistics dictionary
+ for split in 'train', 'val', 'test':
+ if data.get(split) is None:
+ stats[split] = None # i.e. no test set
+ continue
+ x = []
+ dataset = LoadImagesAndLabels(data[split]) # load dataset
+ for label in tqdm(dataset.labels, total=dataset.n, desc='Statistics'):
+ x.append(np.bincount(label[:, 0].astype(int), minlength=data['nc']))
+ x = np.array(x) # shape(128x80)
+ stats[split] = {'instance_stats': {'total': int(x.sum()), 'per_class': x.sum(0).tolist()},
+ 'image_stats': {'total': dataset.n, 'unlabelled': int(np.all(x == 0, 1).sum()),
+ 'per_class': (x > 0).sum(0).tolist()},
+ 'labels': [{str(Path(k).name): round_labels(v.tolist())} for k, v in
+ zip(dataset.img_files, dataset.labels)]}
+
+ if hub:
+ im_dir = hub_dir / 'images'
+ im_dir.mkdir(parents=True, exist_ok=True)
+ for _ in tqdm(ThreadPool(NUM_THREADS).imap(hub_ops, dataset.img_files), total=dataset.n, desc='HUB Ops'):
+ pass
+
+ # Profile
+ stats_path = hub_dir / 'stats.json'
+ if profile:
+ for _ in range(1):
+ file = stats_path.with_suffix('.npy')
+ t1 = time.time()
+ np.save(file, stats)
+ t2 = time.time()
+ x = np.load(file, allow_pickle=True)
+ print(f'stats.npy times: {time.time() - t2:.3f}s read, {t2 - t1:.3f}s write')
+
+ file = stats_path.with_suffix('.json')
+ t1 = time.time()
+ with open(file, 'w') as f:
+ json.dump(stats, f) # save stats *.json
+ t2 = time.time()
+ with open(file) as f:
+ x = json.load(f) # load hyps dict
+ print(f'stats.json times: {time.time() - t2:.3f}s read, {t2 - t1:.3f}s write')
+
+ # Save, print and return
+ if hub:
+ print(f'Saving {stats_path.resolve()}...')
+ with open(stats_path, 'w') as f:
+ json.dump(stats, f) # save stats.json
+ if verbose:
+ print(json.dumps(stats, indent=2, sort_keys=False))
+ return stats
diff --git a/ros2_ws/src/yolov3/utils/docker/Dockerfile b/yolov3/utils/docker/Dockerfile
similarity index 100%
rename from ros2_ws/src/yolov3/utils/docker/Dockerfile
rename to yolov3/utils/docker/Dockerfile
diff --git a/ros2_ws/src/yolov3/utils/docker/Dockerfile-arm64 b/yolov3/utils/docker/Dockerfile-arm64
similarity index 100%
rename from ros2_ws/src/yolov3/utils/docker/Dockerfile-arm64
rename to yolov3/utils/docker/Dockerfile-arm64
diff --git a/ros2_ws/src/yolov3/utils/docker/Dockerfile-cpu b/yolov3/utils/docker/Dockerfile-cpu
similarity index 100%
rename from ros2_ws/src/yolov3/utils/docker/Dockerfile-cpu
rename to yolov3/utils/docker/Dockerfile-cpu
diff --git a/ros2_ws/src/yolov3/utils/downloads.py b/yolov3/utils/downloads.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/downloads.py
rename to yolov3/utils/downloads.py
diff --git a/ros2_ws/src/yolov3/utils/flask_rest_api/README.md b/yolov3/utils/flask_rest_api/README.md
similarity index 100%
rename from ros2_ws/src/yolov3/utils/flask_rest_api/README.md
rename to yolov3/utils/flask_rest_api/README.md
diff --git a/ros2_ws/src/yolov3/utils/flask_rest_api/example_request.py b/yolov3/utils/flask_rest_api/example_request.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/flask_rest_api/example_request.py
rename to yolov3/utils/flask_rest_api/example_request.py
diff --git a/ros2_ws/src/yolov3/utils/flask_rest_api/restapi.py b/yolov3/utils/flask_rest_api/restapi.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/flask_rest_api/restapi.py
rename to yolov3/utils/flask_rest_api/restapi.py
diff --git a/ros2_ws/src/yolov3/utils/general.py b/yolov3/utils/general.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/general.py
rename to yolov3/utils/general.py
diff --git a/ros2_ws/src/yolov3/utils/google_app_engine/Dockerfile b/yolov3/utils/google_app_engine/Dockerfile
similarity index 100%
rename from ros2_ws/src/yolov3/utils/google_app_engine/Dockerfile
rename to yolov3/utils/google_app_engine/Dockerfile
diff --git a/ros2_ws/src/yolov3/utils/google_app_engine/additional_requirements.txt b/yolov3/utils/google_app_engine/additional_requirements.txt
similarity index 100%
rename from ros2_ws/src/yolov3/utils/google_app_engine/additional_requirements.txt
rename to yolov3/utils/google_app_engine/additional_requirements.txt
diff --git a/ros2_ws/src/yolov3/utils/google_app_engine/app.yaml b/yolov3/utils/google_app_engine/app.yaml
similarity index 100%
rename from ros2_ws/src/yolov3/utils/google_app_engine/app.yaml
rename to yolov3/utils/google_app_engine/app.yaml
diff --git a/ros2_ws/src/yolov3/utils/loggers/__init__.py b/yolov3/utils/loggers/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/__init__.py
rename to yolov3/utils/loggers/__init__.py
diff --git a/ros2_ws/src/yolov3/utils/loggers/clearml/README.md b/yolov3/utils/loggers/clearml/README.md
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/clearml/README.md
rename to yolov3/utils/loggers/clearml/README.md
diff --git a/ros2_ws/src/yolov3/utils/loggers/clearml/__init__.py b/yolov3/utils/loggers/clearml/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/clearml/__init__.py
rename to yolov3/utils/loggers/clearml/__init__.py
diff --git a/ros2_ws/src/yolov3/utils/loggers/clearml/clearml_utils.py b/yolov3/utils/loggers/clearml/clearml_utils.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/clearml/clearml_utils.py
rename to yolov3/utils/loggers/clearml/clearml_utils.py
diff --git a/ros2_ws/src/yolov3/utils/loggers/clearml/hpo.py b/yolov3/utils/loggers/clearml/hpo.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/clearml/hpo.py
rename to yolov3/utils/loggers/clearml/hpo.py
diff --git a/ros2_ws/src/yolov3/utils/loggers/comet/README.md b/yolov3/utils/loggers/comet/README.md
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/comet/README.md
rename to yolov3/utils/loggers/comet/README.md
diff --git a/ros2_ws/src/yolov3/utils/loggers/comet/__init__.py b/yolov3/utils/loggers/comet/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/comet/__init__.py
rename to yolov3/utils/loggers/comet/__init__.py
diff --git a/ros2_ws/src/yolov3/utils/loggers/comet/comet_utils.py b/yolov3/utils/loggers/comet/comet_utils.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/comet/comet_utils.py
rename to yolov3/utils/loggers/comet/comet_utils.py
diff --git a/ros2_ws/src/yolov3/utils/loggers/comet/hpo.py b/yolov3/utils/loggers/comet/hpo.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/comet/hpo.py
rename to yolov3/utils/loggers/comet/hpo.py
diff --git a/yolov3/utils/loggers/wandb/README.md b/yolov3/utils/loggers/wandb/README.md
new file mode 100644
index 00000000..bae57bda
--- /dev/null
+++ b/yolov3/utils/loggers/wandb/README.md
@@ -0,0 +1,147 @@
+📚 This guide explains how to use **Weights & Biases** (W&B) with YOLOv3 🚀. UPDATED 29 September 2021.
+* [About Weights & Biases](#about-weights-&-biases)
+* [First-Time Setup](#first-time-setup)
+* [Viewing runs](#viewing-runs)
+* [Advanced Usage: Dataset Versioning and Evaluation](#advanced-usage)
+* [Reports: Share your work with the world!](#reports)
+
+## About Weights & Biases
+Think of [W&B](https://wandb.ai/site?utm_campaign=repo_yolo_wandbtutorial) like GitHub for machine learning models. With a few lines of code, save everything you need to debug, compare and reproduce your models — architecture, hyperparameters, git commits, model weights, GPU usage, and even datasets and predictions.
+
+Used by top researchers including teams at OpenAI, Lyft, Github, and MILA, W&B is part of the new standard of best practices for machine learning. How W&B can help you optimize your machine learning workflows:
+
+ * [Debug](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Free-2) model performance in real time
+ * [GPU usage](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#System-4) visualized automatically
+ * [Custom charts](https://wandb.ai/wandb/customizable-charts/reports/Powerful-Custom-Charts-To-Debug-Model-Peformance--VmlldzoyNzY4ODI) for powerful, extensible visualization
+ * [Share insights](https://wandb.ai/wandb/getting-started/reports/Visualize-Debug-Machine-Learning-Models--VmlldzoyNzY5MDk#Share-8) interactively with collaborators
+ * [Optimize hyperparameters](https://docs.wandb.com/sweeps) efficiently
+ * [Track](https://docs.wandb.com/artifacts) datasets, pipelines, and production models
+
+## First-Time Setup
+
+ Toggle Details
+When you first train, W&B will prompt you to create a new account and will generate an **API key** for you. If you are an existing user you can retrieve your key from https://wandb.ai/authorize. This key is used to tell W&B where to log your data. You only need to supply your key once, and then it is remembered on the same device.
+
+W&B will create a cloud **project** (default is 'YOLOv3') for your training runs, and each new training run will be provided a unique run **name** within that project as project/name. You can also manually set your project and run name as:
+
+ ```shell
+ $ python train.py --project ... --name ...
+ ```
+
+YOLOv3 notebook example: 
 +
+ +
+
+
+
+
+
+
+## Viewing Runs
+
+ Toggle Details
+Run information streams from your environment to the W&B cloud console as you train. This allows you to monitor and even cancel runs in realtime . All important information is logged:
+
+ * Training & Validation losses
+ * Metrics: Precision, Recall, mAP@0.5, mAP@0.5:0.95
+ * Learning Rate over time
+ * A bounding box debugging panel, showing the training progress over time
+ * GPU: Type, **GPU Utilization**, power, temperature, **CUDA memory usage**
+ * System: Disk I/0, CPU utilization, RAM memory usage
+ * Your trained model as W&B Artifact
+ * Environment: OS and Python types, Git repository and state, **training command**
+
+
+
+
+
+
+## Advanced Usage
+You can leverage W&B artifacts and Tables integration to easily visualize and manage your datasets, models and training evaluations. Here are some quick examples to get you started.
+
+ 1. Visualize and Version Datasets
+ Log, visualize, dynamically query, and understand your data with W&B Tables. You can use the following command to log your dataset as a W&B Table. This will generate a {dataset}_wandb.yaml file which can be used to train from dataset artifact.
+
+ Usage
+ Code $ python utils/logger/wandb/log_dataset.py --project ... --name ... --data ..
+
+ 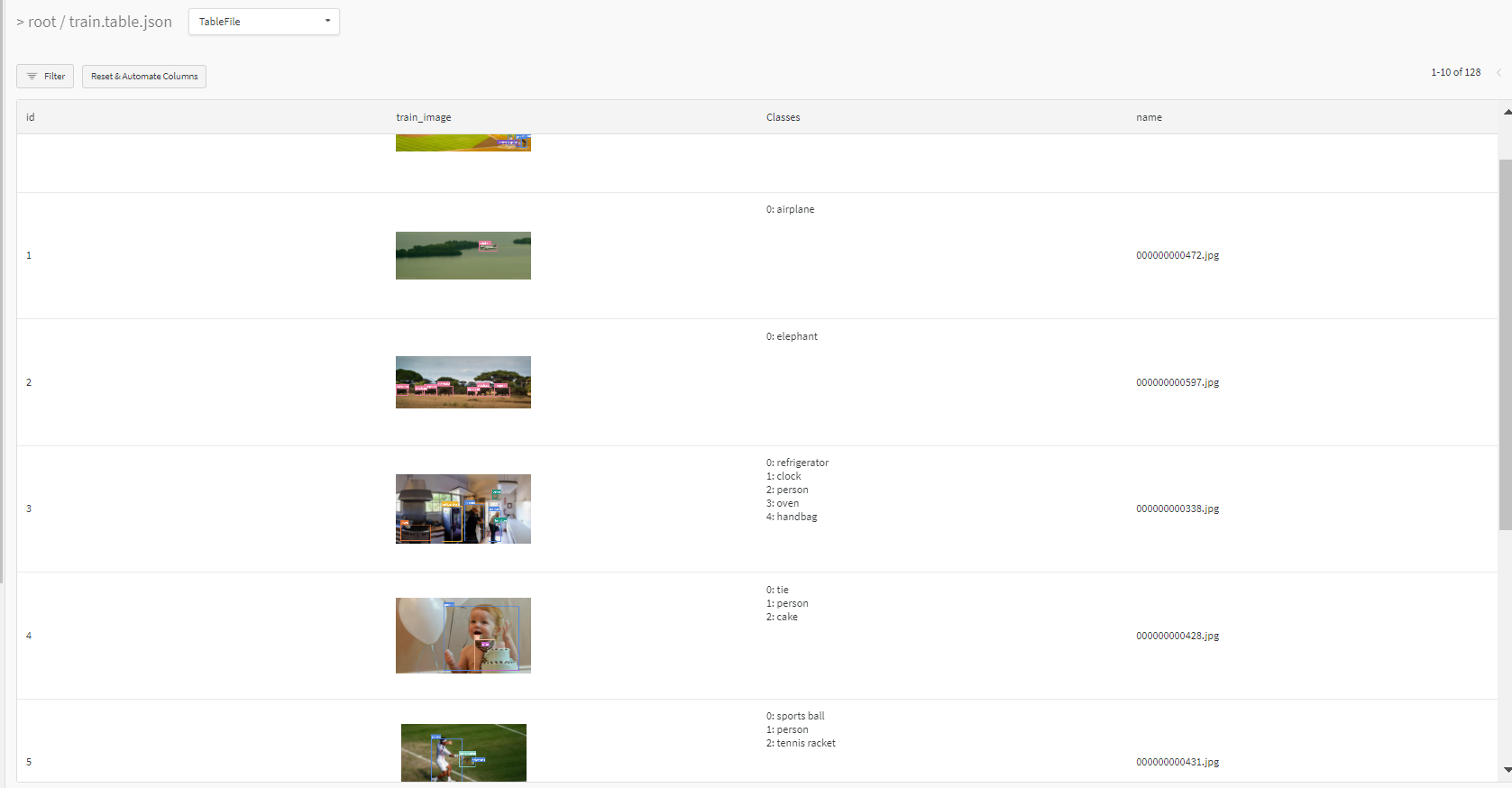
+
+
+ 2: Train and Log Evaluation simultaneousy
+ This is an extension of the previous section, but it'll also training after uploading the dataset. This also evaluation Table
+ Evaluation table compares your predictions and ground truths across the validation set for each epoch. It uses the references to the already uploaded datasets,
+ so no images will be uploaded from your system more than once.
+
+ Usage
+ Code $ python utils/logger/wandb/log_dataset.py --data .. --upload_data
+
+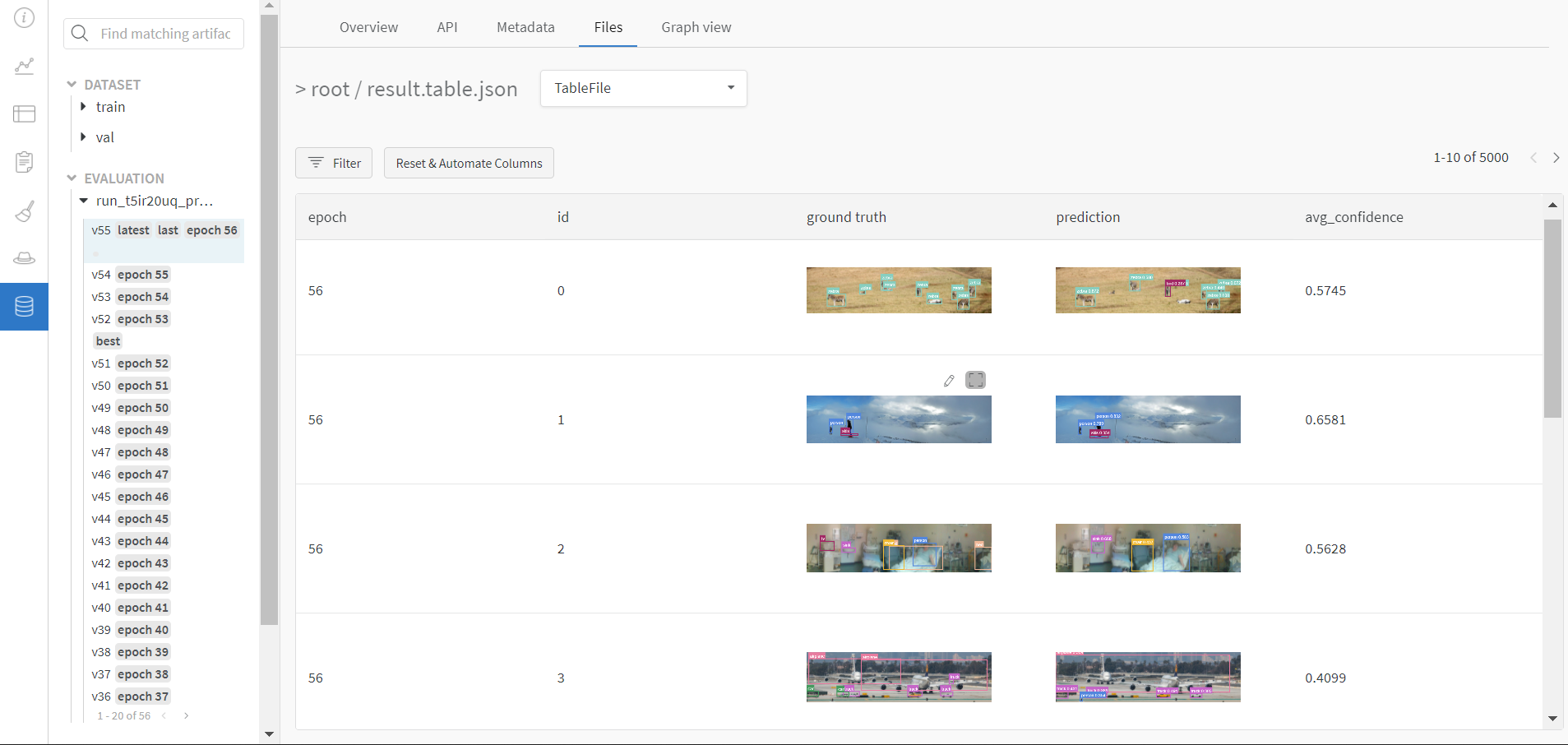
+
+
+ 3: Train using dataset artifact
+ When you upload a dataset as described in the first section, you get a new config file with an added `_wandb` to its name. This file contains the information that
+ can be used to train a model directly from the dataset artifact. This also logs evaluation
+
+ Usage
+ Code $ python utils/logger/wandb/log_dataset.py --data {data}_wandb.yaml
+
+
+
+
+ 4: Save model checkpoints as artifacts
+ To enable saving and versioning checkpoints of your experiment, pass `--save_period n` with the base cammand, where `n` represents checkpoint interval.
+ You can also log both the dataset and model checkpoints simultaneously. If not passed, only the final model will be logged
+
+
+ Usage
+ Code $ python train.py --save_period 1
+
+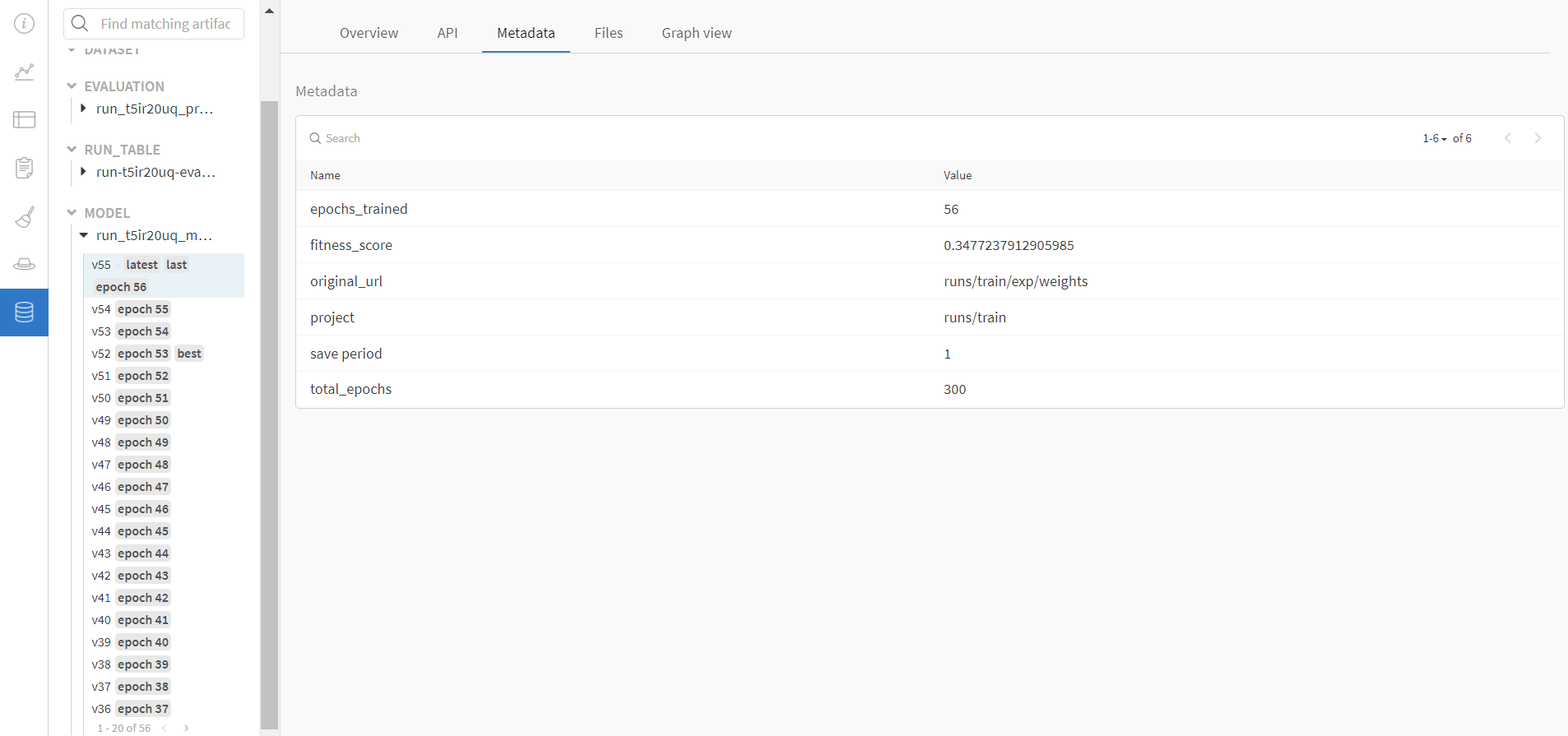
+
+
+
+
+ 5: Resume runs from checkpoint artifacts.
+Any run can be resumed using artifacts if the --resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+ 6: Resume runs from dataset artifact & checkpoint artifacts.
+ Local dataset or model checkpoints are not required. This can be used to resume runs directly on a different device
+ The syntax is same as the previous section, but you'll need to lof both the dataset and model checkpoints as artifacts, i.e, set bot --upload_dataset or
+ train from _wandb.yaml file and set --save_period
+
+
+ Usage
+ Code $ python train.py --resume wandb-artifact://{run_path}
+
+
+
+
+
+
+
+ Reports
+W&B Reports can be created from your saved runs for sharing online. Once a report is created you will receive a link you can use to publically share your results. Here is an example report created from the COCO128 tutorial trainings of all YOLOv5 models ([link](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY)).
+
+ +
+
+## Environments
+
+YOLOv3 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+- **Google Colab and Kaggle** notebooks with free GPU:
+- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov3/wiki/GCP-Quickstart)
+- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov3/wiki/AWS-Quickstart)
+- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov3/wiki/Docker-Quickstart)
+
+
+## Environments
+
+YOLOv3 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):
+
+- **Google Colab and Kaggle** notebooks with free GPU:
+- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://github.com/ultralytics/yolov3/wiki/GCP-Quickstart)
+- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov3/wiki/AWS-Quickstart)
+- **Docker Image**. See [Docker Quickstart Guide](https://github.com/ultralytics/yolov3/wiki/Docker-Quickstart)  +
+
+## Status
+
+
+
+If this badge is green, all [YOLOv3 GitHub Actions](https://github.com/ultralytics/yolov3/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv3 training ([train.py](https://github.com/ultralytics/yolov3/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov3/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov3/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov3/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/ros2_ws/src/yolov3/utils/loggers/wandb/__init__.py b/yolov3/utils/loggers/wandb/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/wandb/__init__.py
rename to yolov3/utils/loggers/wandb/__init__.py
diff --git a/yolov3/utils/loggers/wandb/log_dataset.py b/yolov3/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 00000000..d3c77430
--- /dev/null
+++ b/yolov3/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,27 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+from utils.general import LOGGER
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+ if not logger.wandb:
+ LOGGER.info("install wandb using `pip install wandb` to log the dataset")
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv3', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/yolov3/utils/loggers/wandb/sweep.py b/yolov3/utils/loggers/wandb/sweep.py
new file mode 100644
index 00000000..5e24f96e
--- /dev/null
+++ b/yolov3/utils/loggers/wandb/sweep.py
@@ -0,0 +1,41 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import parse_opt, train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent
+ hyp_dict = vars(wandb.config).get("_items")
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.hyp = str(opt.hyp)
+ opt.project = str(opt.project)
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/yolov3/utils/loggers/wandb/sweep.yaml b/yolov3/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 00000000..c7790d75
--- /dev/null
+++ b/yolov3/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/ros2_ws/src/yolov3/utils/loggers/wandb/wandb_utils.py b/yolov3/utils/loggers/wandb/wandb_utils.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/wandb/wandb_utils.py
rename to yolov3/utils/loggers/wandb/wandb_utils.py
diff --git a/ros2_ws/src/yolov3/utils/loss.py b/yolov3/utils/loss.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loss.py
rename to yolov3/utils/loss.py
diff --git a/ros2_ws/src/yolov3/utils/metrics.py b/yolov3/utils/metrics.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/metrics.py
rename to yolov3/utils/metrics.py
diff --git a/ros2_ws/src/yolov3/utils/plots.py b/yolov3/utils/plots.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/plots.py
rename to yolov3/utils/plots.py
diff --git a/ros2_ws/src/yolov3/utils/segment/__init__.py b/yolov3/utils/segment/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/__init__.py
rename to yolov3/utils/segment/__init__.py
diff --git a/ros2_ws/src/yolov3/utils/segment/augmentations.py b/yolov3/utils/segment/augmentations.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/augmentations.py
rename to yolov3/utils/segment/augmentations.py
diff --git a/ros2_ws/src/yolov3/utils/segment/dataloaders.py b/yolov3/utils/segment/dataloaders.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/dataloaders.py
rename to yolov3/utils/segment/dataloaders.py
diff --git a/ros2_ws/src/yolov3/utils/segment/general.py b/yolov3/utils/segment/general.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/general.py
rename to yolov3/utils/segment/general.py
diff --git a/ros2_ws/src/yolov3/utils/segment/loss.py b/yolov3/utils/segment/loss.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/loss.py
rename to yolov3/utils/segment/loss.py
diff --git a/ros2_ws/src/yolov3/utils/segment/metrics.py b/yolov3/utils/segment/metrics.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/metrics.py
rename to yolov3/utils/segment/metrics.py
diff --git a/ros2_ws/src/yolov3/utils/segment/plots.py b/yolov3/utils/segment/plots.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/plots.py
rename to yolov3/utils/segment/plots.py
diff --git a/ros2_ws/src/yolov3/utils/torch_utils.py b/yolov3/utils/torch_utils.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/torch_utils.py
rename to yolov3/utils/torch_utils.py
diff --git a/ros2_ws/src/yolov3/utils/triton.py b/yolov3/utils/triton.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/triton.py
rename to yolov3/utils/triton.py
diff --git a/ros2_ws/src/yolov3/val.py b/yolov3/val.py
similarity index 100%
rename from ros2_ws/src/yolov3/val.py
rename to yolov3/val.py
+
+
+## Status
+
+
+
+If this badge is green, all [YOLOv3 GitHub Actions](https://github.com/ultralytics/yolov3/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv3 training ([train.py](https://github.com/ultralytics/yolov3/blob/master/train.py)), validation ([val.py](https://github.com/ultralytics/yolov3/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov3/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov3/blob/master/export.py)) on MacOS, Windows, and Ubuntu every 24 hours and on every commit.
diff --git a/ros2_ws/src/yolov3/utils/loggers/wandb/__init__.py b/yolov3/utils/loggers/wandb/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/wandb/__init__.py
rename to yolov3/utils/loggers/wandb/__init__.py
diff --git a/yolov3/utils/loggers/wandb/log_dataset.py b/yolov3/utils/loggers/wandb/log_dataset.py
new file mode 100644
index 00000000..d3c77430
--- /dev/null
+++ b/yolov3/utils/loggers/wandb/log_dataset.py
@@ -0,0 +1,27 @@
+import argparse
+
+from wandb_utils import WandbLogger
+
+from utils.general import LOGGER
+
+WANDB_ARTIFACT_PREFIX = 'wandb-artifact://'
+
+
+def create_dataset_artifact(opt):
+ logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused
+ if not logger.wandb:
+ LOGGER.info("install wandb using `pip install wandb` to log the dataset")
+
+
+if __name__ == '__main__':
+ parser = argparse.ArgumentParser()
+ parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
+ parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
+ parser.add_argument('--project', type=str, default='YOLOv3', help='name of W&B Project')
+ parser.add_argument('--entity', default=None, help='W&B entity')
+ parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')
+
+ opt = parser.parse_args()
+ opt.resume = False # Explicitly disallow resume check for dataset upload job
+
+ create_dataset_artifact(opt)
diff --git a/yolov3/utils/loggers/wandb/sweep.py b/yolov3/utils/loggers/wandb/sweep.py
new file mode 100644
index 00000000..5e24f96e
--- /dev/null
+++ b/yolov3/utils/loggers/wandb/sweep.py
@@ -0,0 +1,41 @@
+import sys
+from pathlib import Path
+
+import wandb
+
+FILE = Path(__file__).resolve()
+ROOT = FILE.parents[3] # root directory
+if str(ROOT) not in sys.path:
+ sys.path.append(str(ROOT)) # add ROOT to PATH
+
+from train import parse_opt, train
+from utils.callbacks import Callbacks
+from utils.general import increment_path
+from utils.torch_utils import select_device
+
+
+def sweep():
+ wandb.init()
+ # Get hyp dict from sweep agent
+ hyp_dict = vars(wandb.config).get("_items")
+
+ # Workaround: get necessary opt args
+ opt = parse_opt(known=True)
+ opt.batch_size = hyp_dict.get("batch_size")
+ opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
+ opt.epochs = hyp_dict.get("epochs")
+ opt.nosave = True
+ opt.data = hyp_dict.get("data")
+ opt.weights = str(opt.weights)
+ opt.cfg = str(opt.cfg)
+ opt.data = str(opt.data)
+ opt.hyp = str(opt.hyp)
+ opt.project = str(opt.project)
+ device = select_device(opt.device, batch_size=opt.batch_size)
+
+ # train
+ train(hyp_dict, opt, device, callbacks=Callbacks())
+
+
+if __name__ == "__main__":
+ sweep()
diff --git a/yolov3/utils/loggers/wandb/sweep.yaml b/yolov3/utils/loggers/wandb/sweep.yaml
new file mode 100644
index 00000000..c7790d75
--- /dev/null
+++ b/yolov3/utils/loggers/wandb/sweep.yaml
@@ -0,0 +1,143 @@
+# Hyperparameters for training
+# To set range-
+# Provide min and max values as:
+# parameter:
+#
+# min: scalar
+# max: scalar
+# OR
+#
+# Set a specific list of search space-
+# parameter:
+# values: [scalar1, scalar2, scalar3...]
+#
+# You can use grid, bayesian and hyperopt search strategy
+# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration
+
+program: utils/loggers/wandb/sweep.py
+method: random
+metric:
+ name: metrics/mAP_0.5
+ goal: maximize
+
+parameters:
+ # hyperparameters: set either min, max range or values list
+ data:
+ value: "data/coco128.yaml"
+ batch_size:
+ values: [64]
+ epochs:
+ values: [10]
+
+ lr0:
+ distribution: uniform
+ min: 1e-5
+ max: 1e-1
+ lrf:
+ distribution: uniform
+ min: 0.01
+ max: 1.0
+ momentum:
+ distribution: uniform
+ min: 0.6
+ max: 0.98
+ weight_decay:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ warmup_epochs:
+ distribution: uniform
+ min: 0.0
+ max: 5.0
+ warmup_momentum:
+ distribution: uniform
+ min: 0.0
+ max: 0.95
+ warmup_bias_lr:
+ distribution: uniform
+ min: 0.0
+ max: 0.2
+ box:
+ distribution: uniform
+ min: 0.02
+ max: 0.2
+ cls:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ cls_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ obj:
+ distribution: uniform
+ min: 0.2
+ max: 4.0
+ obj_pw:
+ distribution: uniform
+ min: 0.5
+ max: 2.0
+ iou_t:
+ distribution: uniform
+ min: 0.1
+ max: 0.7
+ anchor_t:
+ distribution: uniform
+ min: 2.0
+ max: 8.0
+ fl_gamma:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_h:
+ distribution: uniform
+ min: 0.0
+ max: 0.1
+ hsv_s:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ hsv_v:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ degrees:
+ distribution: uniform
+ min: 0.0
+ max: 45.0
+ translate:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ scale:
+ distribution: uniform
+ min: 0.0
+ max: 0.9
+ shear:
+ distribution: uniform
+ min: 0.0
+ max: 10.0
+ perspective:
+ distribution: uniform
+ min: 0.0
+ max: 0.001
+ flipud:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ fliplr:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mosaic:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ mixup:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
+ copy_paste:
+ distribution: uniform
+ min: 0.0
+ max: 1.0
diff --git a/ros2_ws/src/yolov3/utils/loggers/wandb/wandb_utils.py b/yolov3/utils/loggers/wandb/wandb_utils.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loggers/wandb/wandb_utils.py
rename to yolov3/utils/loggers/wandb/wandb_utils.py
diff --git a/ros2_ws/src/yolov3/utils/loss.py b/yolov3/utils/loss.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/loss.py
rename to yolov3/utils/loss.py
diff --git a/ros2_ws/src/yolov3/utils/metrics.py b/yolov3/utils/metrics.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/metrics.py
rename to yolov3/utils/metrics.py
diff --git a/ros2_ws/src/yolov3/utils/plots.py b/yolov3/utils/plots.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/plots.py
rename to yolov3/utils/plots.py
diff --git a/ros2_ws/src/yolov3/utils/segment/__init__.py b/yolov3/utils/segment/__init__.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/__init__.py
rename to yolov3/utils/segment/__init__.py
diff --git a/ros2_ws/src/yolov3/utils/segment/augmentations.py b/yolov3/utils/segment/augmentations.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/augmentations.py
rename to yolov3/utils/segment/augmentations.py
diff --git a/ros2_ws/src/yolov3/utils/segment/dataloaders.py b/yolov3/utils/segment/dataloaders.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/dataloaders.py
rename to yolov3/utils/segment/dataloaders.py
diff --git a/ros2_ws/src/yolov3/utils/segment/general.py b/yolov3/utils/segment/general.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/general.py
rename to yolov3/utils/segment/general.py
diff --git a/ros2_ws/src/yolov3/utils/segment/loss.py b/yolov3/utils/segment/loss.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/loss.py
rename to yolov3/utils/segment/loss.py
diff --git a/ros2_ws/src/yolov3/utils/segment/metrics.py b/yolov3/utils/segment/metrics.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/metrics.py
rename to yolov3/utils/segment/metrics.py
diff --git a/ros2_ws/src/yolov3/utils/segment/plots.py b/yolov3/utils/segment/plots.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/segment/plots.py
rename to yolov3/utils/segment/plots.py
diff --git a/ros2_ws/src/yolov3/utils/torch_utils.py b/yolov3/utils/torch_utils.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/torch_utils.py
rename to yolov3/utils/torch_utils.py
diff --git a/ros2_ws/src/yolov3/utils/triton.py b/yolov3/utils/triton.py
similarity index 100%
rename from ros2_ws/src/yolov3/utils/triton.py
rename to yolov3/utils/triton.py
diff --git a/ros2_ws/src/yolov3/val.py b/yolov3/val.py
similarity index 100%
rename from ros2_ws/src/yolov3/val.py
rename to yolov3/val.py